200 G4bool IsParallel = false ;
201 G4bool IsConverged = false ;
243 G4bool tmpisvalid = false ;
245 std::vector<Intersection> xbuf ;
252 G4double phixz = fPhiTwist * ( p.
x() * v.
z() - p.
z() * v.
x() ) ;
253 G4double phiyz = fPhiTwist * ( p.
y() * v.
z() - p.
z() * v.
y() ) ;
259 if ( std::fabs(p.
z()) <= L ) {
261 phi = p.
z() * fPhiTwist /
L ;
263 u = (2*(fdeltaY*phi*v.
x() - fPhiTwist*p.
y()*v.
x() - fdeltaX*phi*v.
y()
264 + fPhiTwist*p.
x()*v.
y()) + (fDy2plus1*fPhiTwist
265 + 2*fDy2minus1*phi)*(v.
x()*std::cos(phi) + v.
y()*std::sin(phi)))
266 / (2.* fPhiTwist*(v.
y()*std::cos(phi) - v.
x()*std::sin(phi)));
274 xbuf.push_back(xbuftmp) ;
285 areacode[0], isvalid[0],
286 0, validate, &gp, &gv);
302 c[8] = -3600*(-2*phiyz + fDy2plus1*fPhiTwist*v.
z()) ;
303 c[7] = -7200*(phixz - 2*fDz*v.
y() + (fdeltaY + fDy2minus1)*v.
z()) ;
304 c[6] = 120*(-52*phiyz - 120*fDz*v.
x() + 60*fdeltaX*v.
z() + 11*fDy2plus1*fPhiTwist*v.
z()) ;
305 c[5] = 240*(16*phixz - 52*fDz*v.
y() + 26*fdeltaY*v.
z() + 11*fDy2minus1*v.
z()) ;
306 c[4] = 12*(127*phiyz + 640*fDz*v.
x() - 320*fdeltaX*v.
z() + 4*fDy2plus1*fPhiTwist*v.
z()) ;
307 c[3] = -404*phixz + 3048*fDz*v.
y() - 1524*fdeltaY*v.
z() + 96*fDy2minus1*v.
z() ;
308 c[2] = -72*phiyz + 404*(-2*fDz*v.
x() + fdeltaX*v.
z()) ;
309 c[1] = 12*(phixz - 12*fDz*v.
y() + 6*fdeltaY*v.
z()) ;
310 c[0] = 24*fDz*v.
x() - 12*fdeltaX*v.
z() ;
314 G4cout <<
"coef = " << c[0] <<
" "
329 for (
G4int i = 0 ; i<num ; i++ ) {
332 G4cout <<
"Solution " << i <<
" : " << srd[i] <<
G4endl ;
334 phi = std::fmod(srd[i] , pihalf) ;
336 u = (1/std::cos(phi)*(2*phixz + 4*fDz*phi*v.
x() - 2*fdeltaX*phi*v.
z() + (fDy2plus1*fPhiTwist + 2*fDy2minus1*phi)*v.
z()* std::sin(phi)))/(2.*fPhiTwist*v.
z()) ;
344 xbuf.push_back(xbuftmp) ;
347 G4cout <<
"solution " << i <<
" = " << phi <<
" , " << u <<
G4endl ;
366 for (
size_t k = 0 ; k<xbuf.size() ; k++ ) {
369 G4cout <<
"Solution " << k <<
" : "
370 <<
"reconstructed phiR = " << xbuf[k].phi
371 <<
", uR = " << xbuf[k].u <<
G4endl ;
377 IsConverged = false ;
379 for (
G4int i = 1 ; i<maxint ; i++ ) {
381 xxonsurface = SurfacePoint(phi,u) ;
382 surfacenormal = NormAng(phi,u) ;
384 deltaX = ( tmpxx - xxonsurface ).mag() ;
385 theta = std::fabs(std::acos(v*surfacenormal) - pihalf) ;
386 if ( theta < 0.001 ) {
395 G4cout <<
"Step i = " << i <<
", distance = " << tmpdist <<
", " << deltaX <<
G4endl ;
399 GetPhiUAtX(tmpxx, phi, u) ;
402 G4cout <<
"approximated phi = " << phi <<
", u = " << u <<
G4endl ;
405 if ( deltaX <= factor*ctol ) { IsConverged = true ; break ; }
411 if ( std::fabs(tmpdist)<ctol ) tmpdist = 0 ;
415 G4cout <<
"refined solution " << phi <<
" , " << u <<
G4endl ;
425 tmpareacode = GetAreaCode(tmpxx);
427 if (tmpdist >= 0) tmpisvalid =
true;
430 tmpareacode = GetAreaCode(tmpxx,
false);
432 if (tmpdist >= 0) tmpisvalid =
true;
435 G4Exception(
"G4TwistTrapParallelSide::DistanceToSurface()",
437 "Feature NOT implemented !");
449 xbuf[k].distance = tmpdist ;
450 xbuf[k].areacode = tmpareacode ;
451 xbuf[k].isvalid = tmpisvalid ;
460 G4cout << G4endl <<
"list xbuf after sorting : " <<
G4endl ;
466 xbuf.erase( std::unique(xbuf.begin(), xbuf.end() ,
EqualIntersection ) , xbuf.end() ) ;
471 G4int nxxtmp = xbuf.size() ;
473 if ( nxxtmp<2 || IsParallel ) {
489 xbuf.push_back(xbuftmp) ;
505 xbuf.push_back(xbuftmp) ;
507 for (
size_t k = nxxtmp ; k<xbuf.size() ; k++ ) {
510 G4cout <<
"Solution " << k <<
" : "
511 <<
"reconstructed phiR = " << xbuf[k].phi
512 <<
", uR = " << xbuf[k].u <<
G4endl ;
518 IsConverged = false ;
520 for (
G4int i = 1 ; i<maxint ; i++ ) {
522 xxonsurface = SurfacePoint(phi,u) ;
523 surfacenormal = NormAng(phi,u) ;
525 deltaX = ( tmpxx - xxonsurface ).mag() ;
526 theta = std::fabs(std::acos(v*surfacenormal) - pihalf) ;
527 if ( theta < 0.001 ) {
535 G4cout <<
"Step i = " << i <<
", distance = " << tmpdist <<
", " << deltaX <<
G4endl ;
539 GetPhiUAtX(tmpxx, phi, u) ;
542 G4cout <<
"approximated phi = " << phi <<
", u = " << u <<
G4endl ;
545 if ( deltaX <= factor*ctol ) { IsConverged = true ; break ; }
551 if ( std::fabs(tmpdist)<ctol ) tmpdist = 0 ;
555 G4cout <<
"refined solution " << phi <<
" , " << u <<
G4endl ;
565 tmpareacode = GetAreaCode(tmpxx);
567 if (tmpdist >= 0) tmpisvalid =
true;
570 tmpareacode = GetAreaCode(tmpxx,
false);
572 if (tmpdist >= 0) tmpisvalid =
true;
575 G4Exception(
"G4TwistedBoxSide::DistanceToSurface()",
577 "Feature NOT implemented !");
589 xbuf[k].distance = tmpdist ;
590 xbuf[k].areacode = tmpareacode ;
591 xbuf[k].isvalid = tmpisvalid ;
604 xbuf.erase( std::unique(xbuf.begin(), xbuf.end() ,
EqualIntersection ) , xbuf.end() ) ;
607 G4cout << G4endl <<
"list xbuf after sorting : " <<
G4endl ;
613 for (
size_t i = 0 ; i<xbuf.size() ; i++ ) {
615 distance[i] = xbuf[i].distance;
617 areacode[i] = xbuf[i].areacode ;
618 isvalid[i] = xbuf[i].isvalid ;
621 isvalid[i], nxx, validate, &gp, &gv);
624 G4cout <<
"element Nr. " << i
625 <<
", local Intersection = " << xbuf[i].xx
626 <<
", distance = " << xbuf[i].distance
627 <<
", u = " << xbuf[i].u
628 <<
", phi = " << xbuf[i].phi
629 <<
", isvalid = " << xbuf[i].isvalid
637 G4cout <<
"G4TwistTrapParallelSide finished " <<
G4endl ;
638 G4cout << nxx <<
" possible physical solutions found" <<
G4endl ;
639 for (
G4int k= 0 ; k< nxx ; k++ ) {
640 G4cout <<
"global intersection Point found: " << gxx[k] <<
G4endl ;
void set(double x, double y, double z)
G4int GetAreacode(G4int i) const
static const G4double kInfinity
G4ThreeVector ComputeLocalDirection(const G4ThreeVector &gp) const
G4double DistanceToPlaneWithV(const G4ThreeVector &p, const G4ThreeVector &v, const G4ThreeVector &x0, const G4ThreeVector &n0, G4ThreeVector &xx)
static const G4int sOutside
G4ThreeVector ComputeGlobalPoint(const G4ThreeVector &lp) const
G4GLOB_DLL std::ostream G4cout
G4bool IsOutside(G4int areacode) const
G4double GetDistance(G4int i) const
void SetCurrentStatus(G4int i, G4ThreeVector &xx, G4double &dist, G4int &areacode, G4bool &isvalid, G4int nxx, EValidate validate, const G4ThreeVector *p, const G4ThreeVector *v=0)
G4bool IsValid(G4int i) const
G4bool IsInside(G4int areacode, G4bool testbitmode=false) const
void G4Exception(const char *originOfException, const char *exceptionCode, G4ExceptionSeverity severity, const char *comments)
G4ThreeVector GetXX(G4int i) const
G4bool EqualIntersection(const Intersection &a, const Intersection &b)
static constexpr double pi
G4ThreeVector ComputeLocalPoint(const G4ThreeVector &gp) const
static constexpr double L
G4bool DistanceSort(const Intersection &a, const Intersection &b)
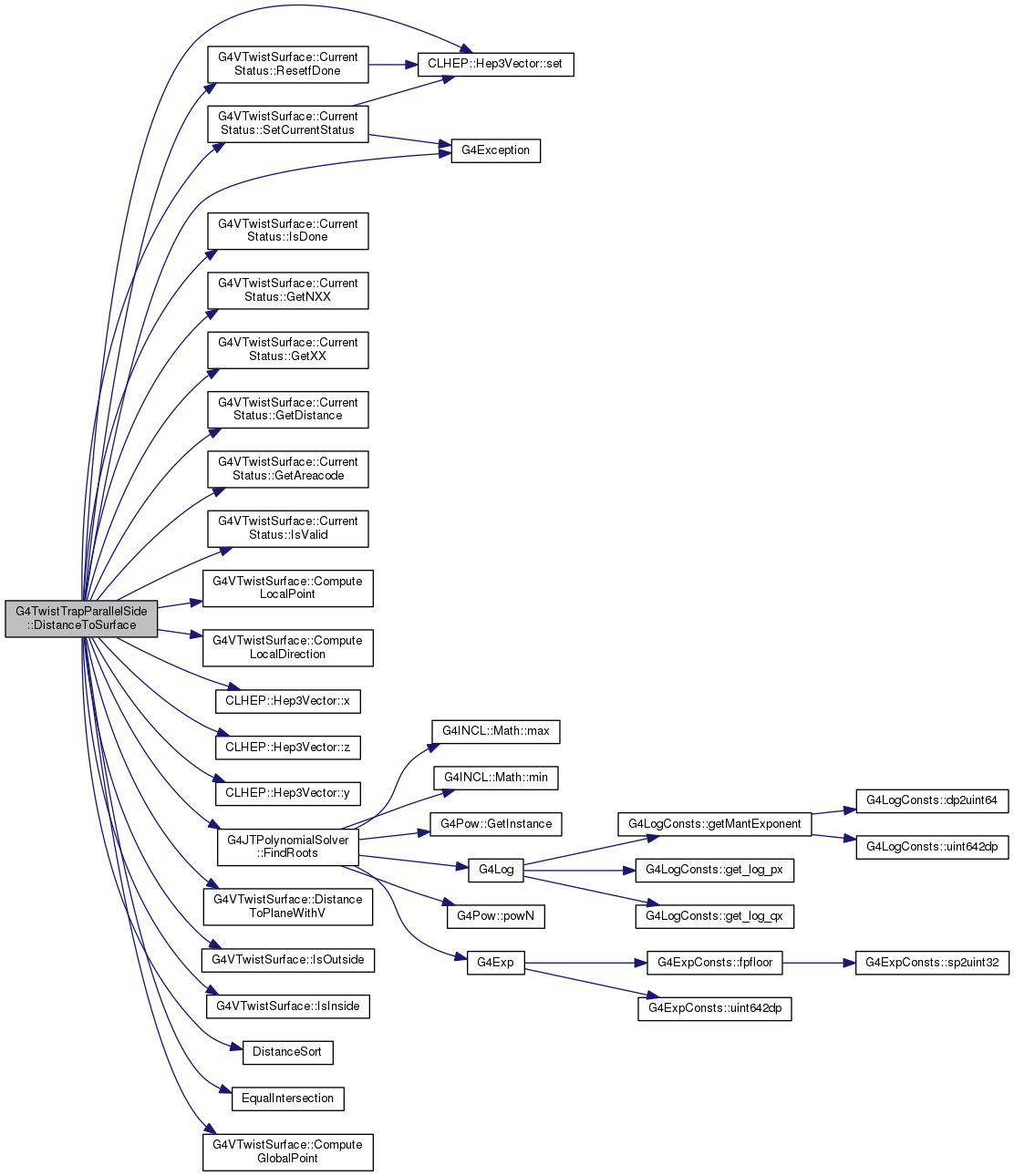
G4int FindRoots(G4double *op, G4int degree, G4double *zeror, G4double *zeroi)
CurrentStatus fCurStatWithV
void ResetfDone(EValidate validate, const G4ThreeVector *p, const G4ThreeVector *v=0)
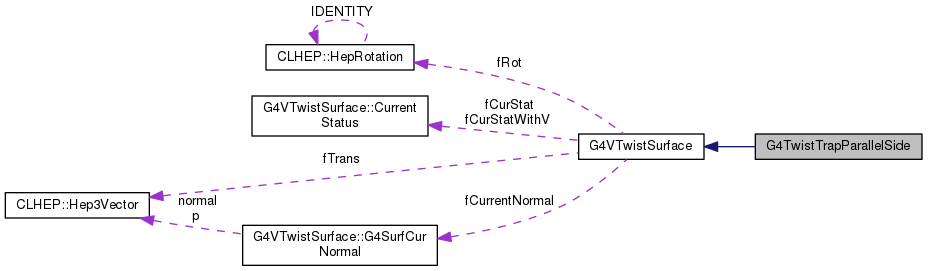
 Public Types inherited from G4VTwistSurface
Public Types inherited from G4VTwistSurface
 1.8.5
1.8.5 
