|
Geant4
10.03.p01
|
|
Geant4
10.03.p01
|
#include <ThreeVector.h>
Public Types | |
| enum | { X =0, Y =1, Z =2, NUM_COORDINATES =3, SIZE =NUM_COORDINATES } |
| enum | { ToleranceTicks = 100 } |
Public Member Functions | |
| Hep3Vector () | |
| Hep3Vector (double x) | |
| Hep3Vector (double x, double y) | |
| Hep3Vector (double x, double y, double z) | |
| Hep3Vector (const Hep3Vector &) | |
| ~Hep3Vector () | |
| double | operator() (int) const |
| double | operator[] (int) const |
| double & | operator() (int) |
| double & | operator[] (int) |
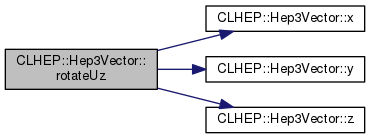
| double | x () const |
| double | y () const |
| double | z () const |
| void | setX (double) |
| void | setY (double) |
| void | setZ (double) |
| void | set (double x, double y, double z) |
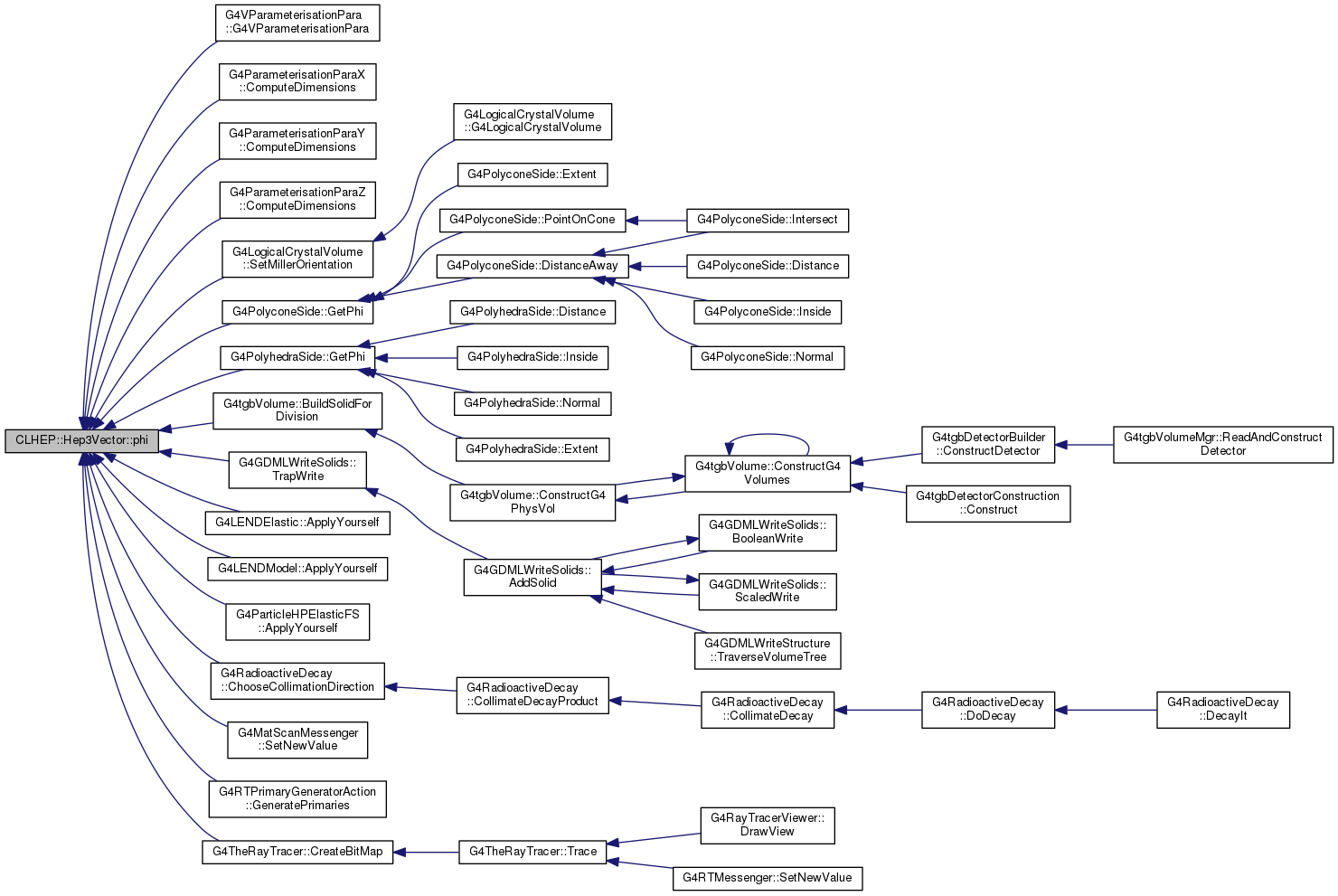
| double | phi () const |
| double | theta () const |
| double | cosTheta () const |
| double | cos2Theta () const |
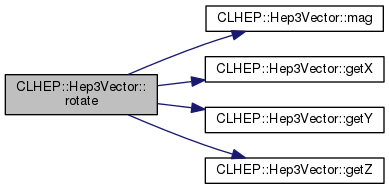
| double | mag2 () const |
| double | mag () const |
| void | setPhi (double) |
| void | setTheta (double) |
| void | setMag (double) |
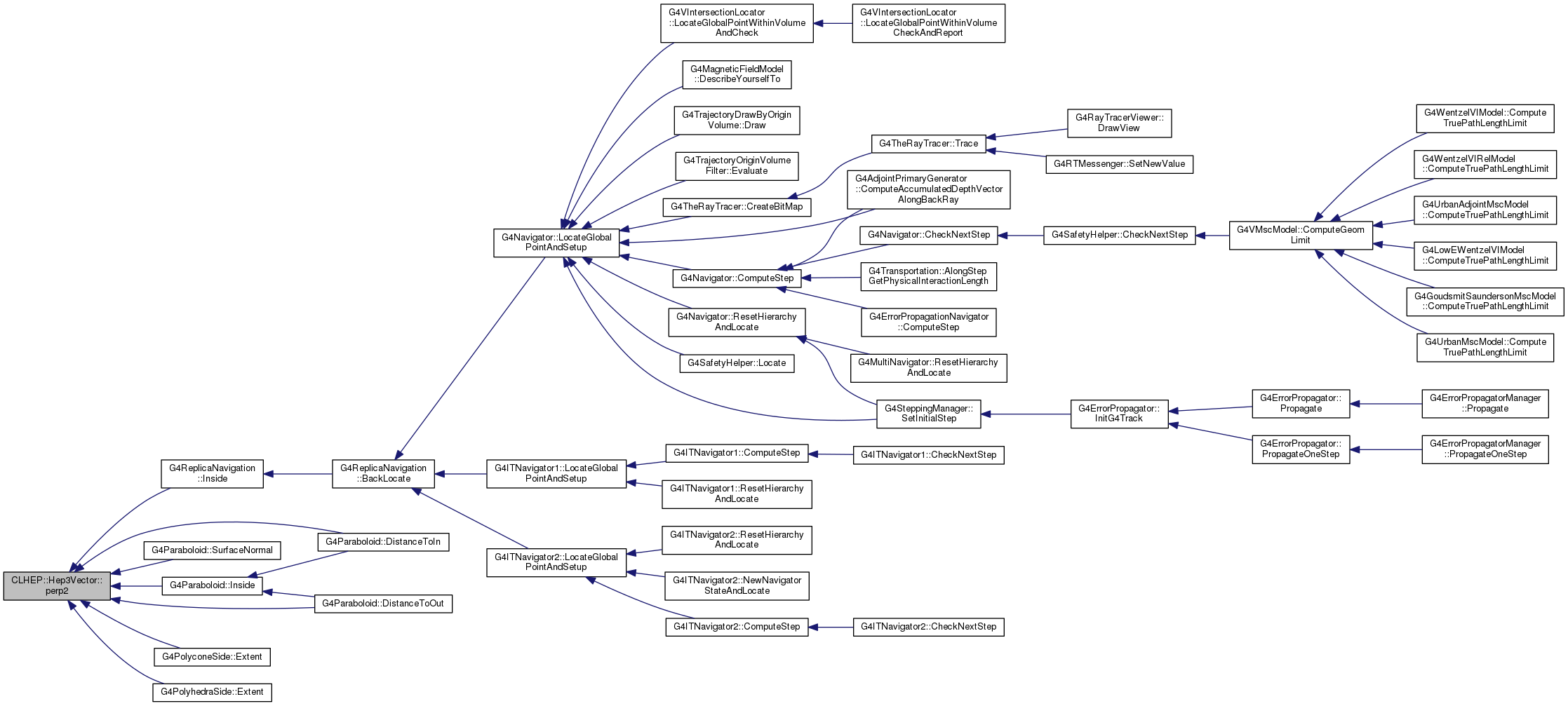
| double | perp2 () const |
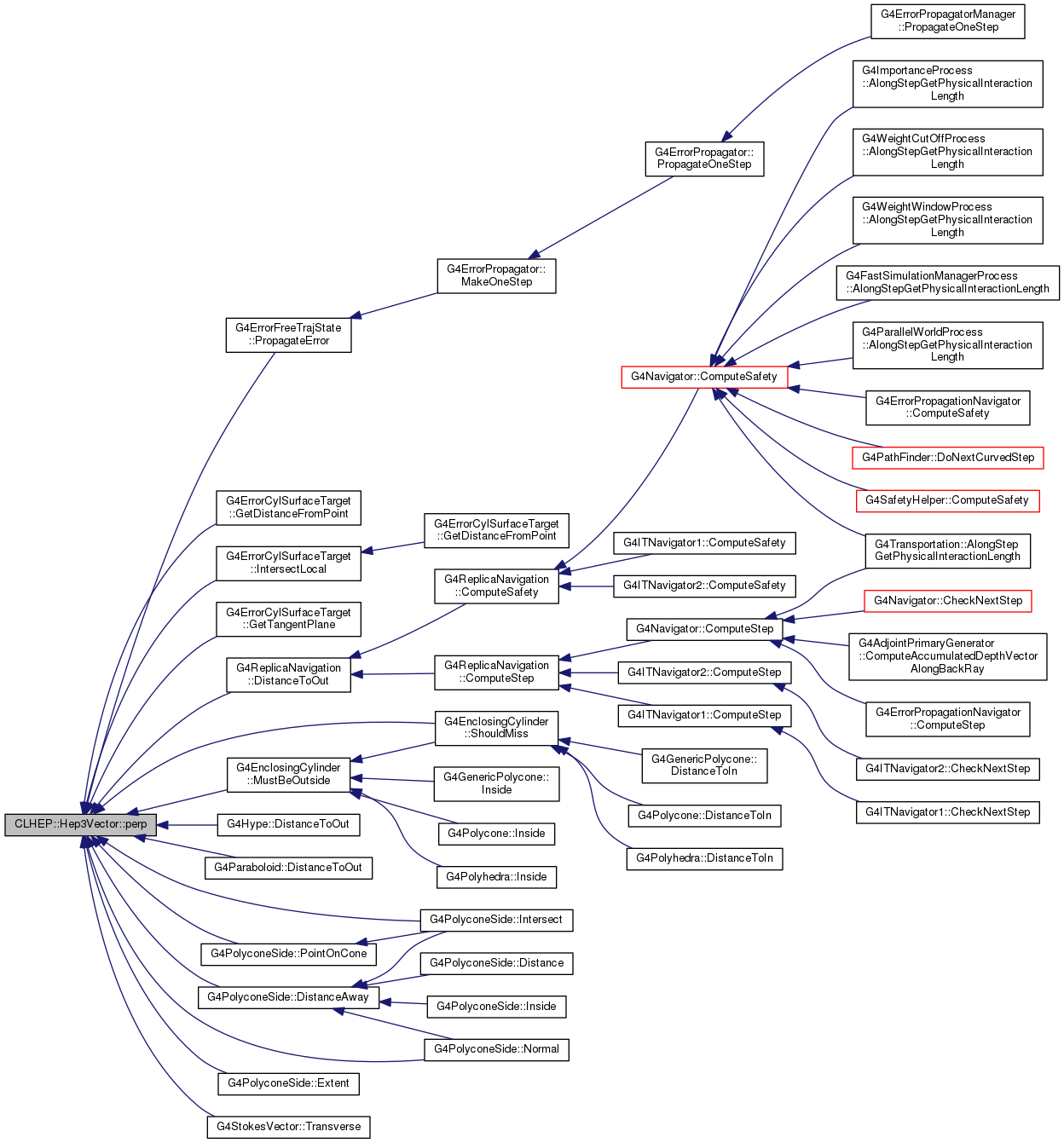
| double | perp () const |
| void | setPerp (double) |
| void | setCylTheta (double) |
| double | perp2 (const Hep3Vector &) const |
| double | perp (const Hep3Vector &) const |
| Hep3Vector & | operator= (const Hep3Vector &) |
| bool | operator== (const Hep3Vector &) const |
| bool | operator!= (const Hep3Vector &) const |
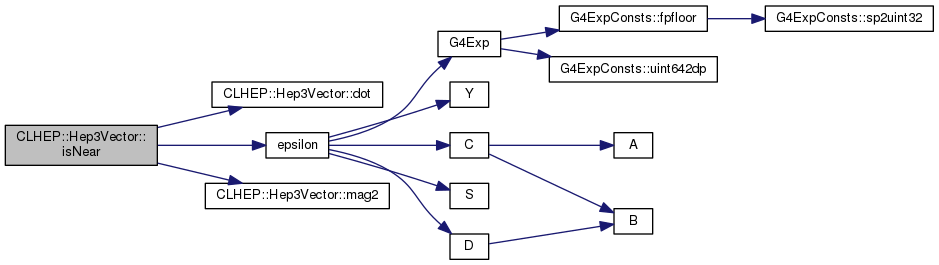
| bool | isNear (const Hep3Vector &, double epsilon=tolerance) const |
| double | howNear (const Hep3Vector &v) const |
| double | deltaR (const Hep3Vector &v) const |
| Hep3Vector & | operator+= (const Hep3Vector &) |
| Hep3Vector & | operator-= (const Hep3Vector &) |
| Hep3Vector | operator- () const |
| Hep3Vector & | operator*= (double) |
| Hep3Vector & | operator/= (double) |
| Hep3Vector | unit () const |
| Hep3Vector | orthogonal () const |
| double | dot (const Hep3Vector &) const |
| Hep3Vector | cross (const Hep3Vector &) const |
| double | angle (const Hep3Vector &) const |
| double | pseudoRapidity () const |
| void | setEta (double p) |
| void | setCylEta (double p) |
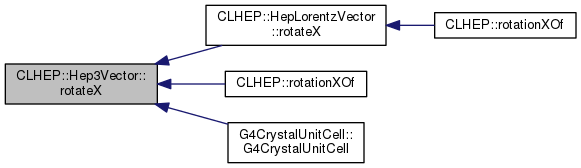
| Hep3Vector & | rotateX (double) |
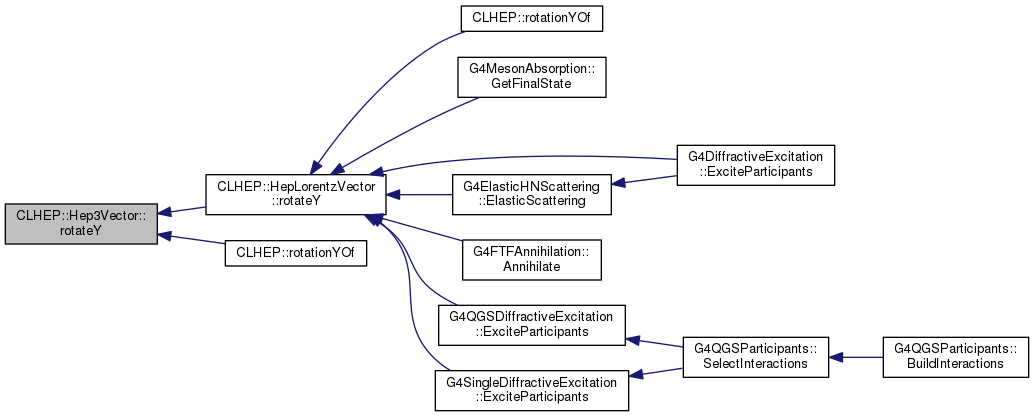
| Hep3Vector & | rotateY (double) |
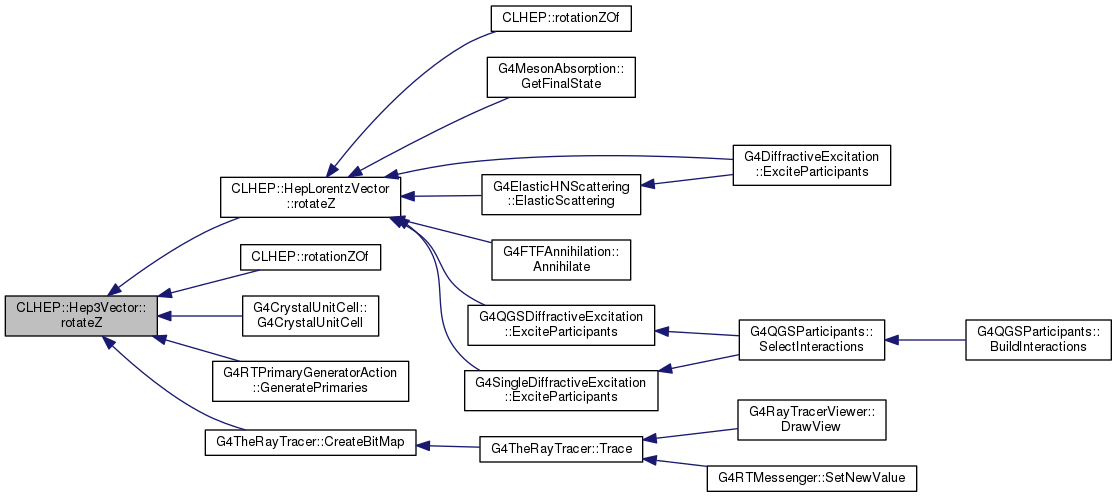
| Hep3Vector & | rotateZ (double) |
| Hep3Vector & | rotateUz (const Hep3Vector &) |
| Hep3Vector & | rotate (double, const Hep3Vector &) |
| Hep3Vector & | operator*= (const HepRotation &) |
| Hep3Vector & | transform (const HepRotation &) |
| void | setRThetaPhi (double r, double theta, double phi) |
| void | setREtaPhi (double r, double eta, double phi) |
| void | setRhoPhiZ (double rho, double phi, double z) |
| void | setRhoPhiTheta (double rho, double phi, double theta) |
| void | setRhoPhiEta (double rho, double phi, double eta) |
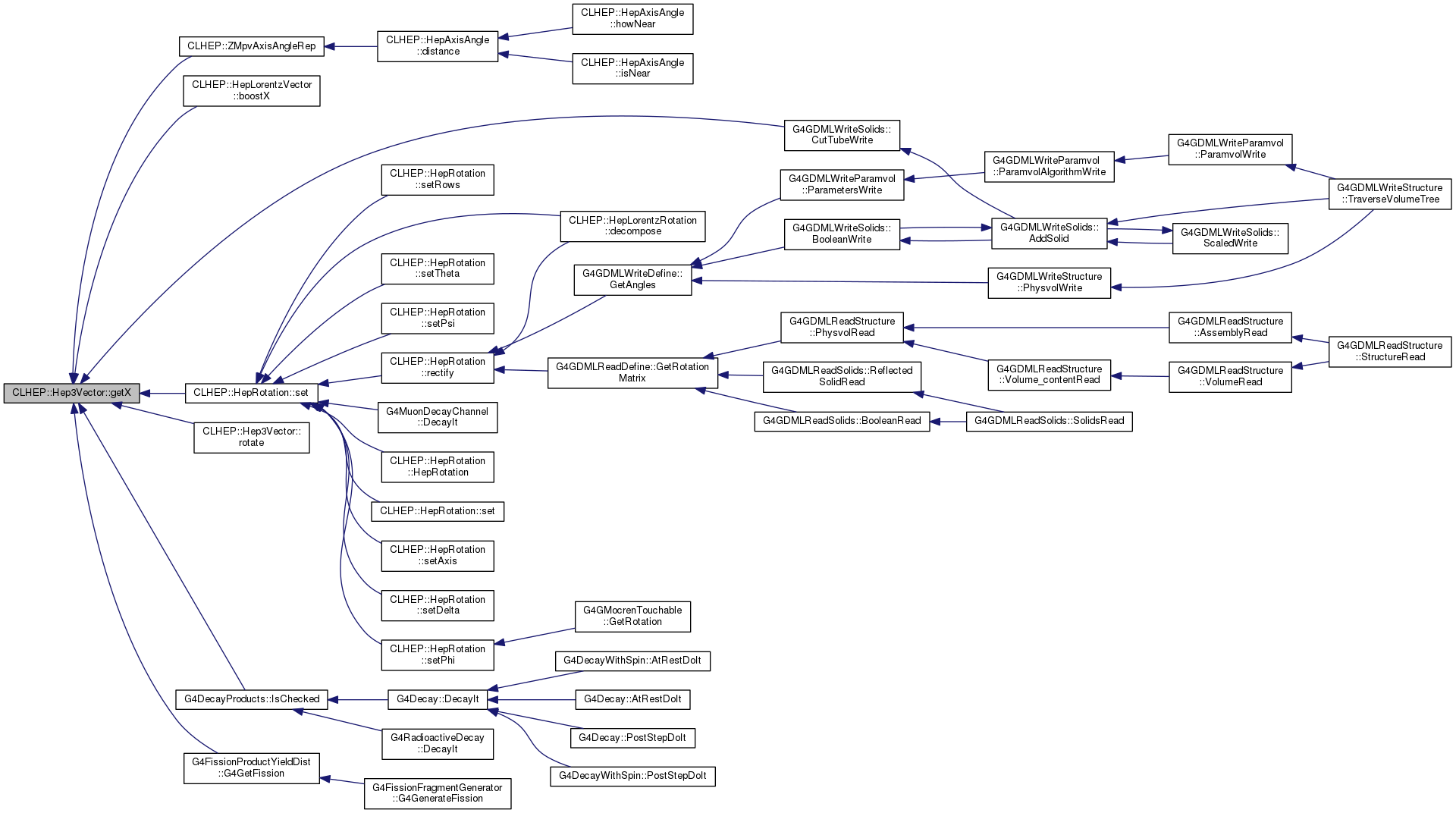
| double | getX () const |
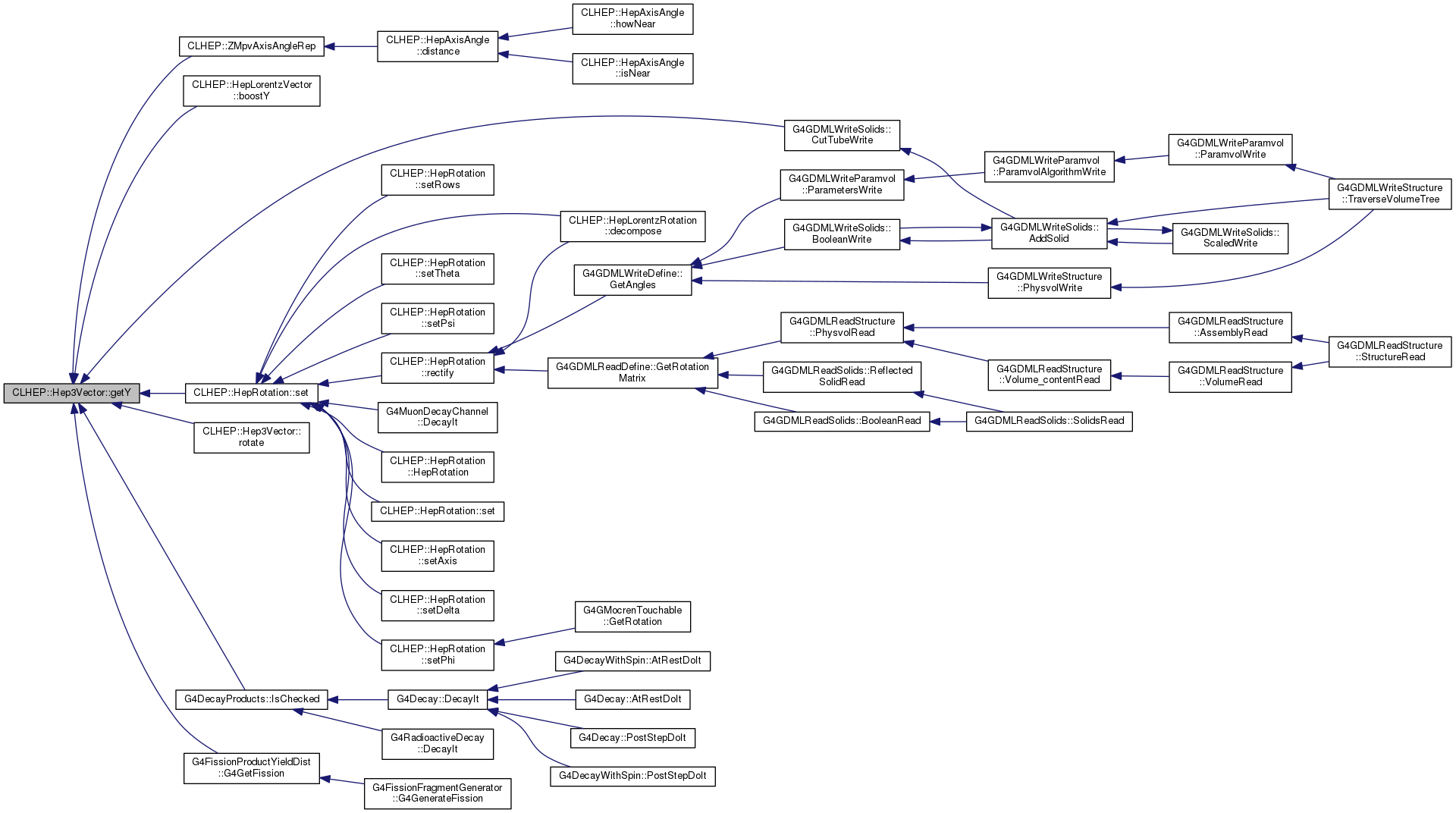
| double | getY () const |
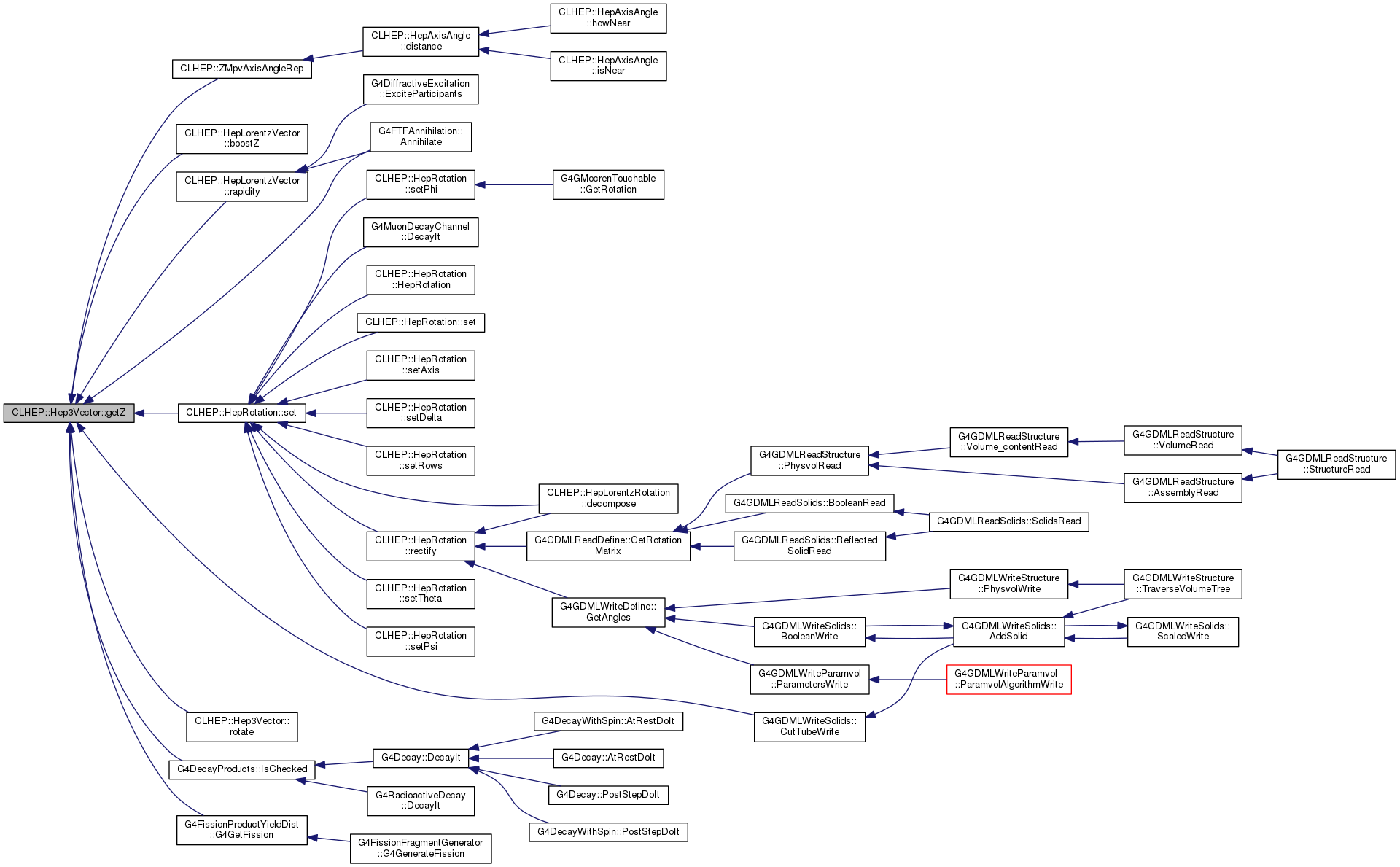
| double | getZ () const |
| double | getR () const |
| double | getTheta () const |
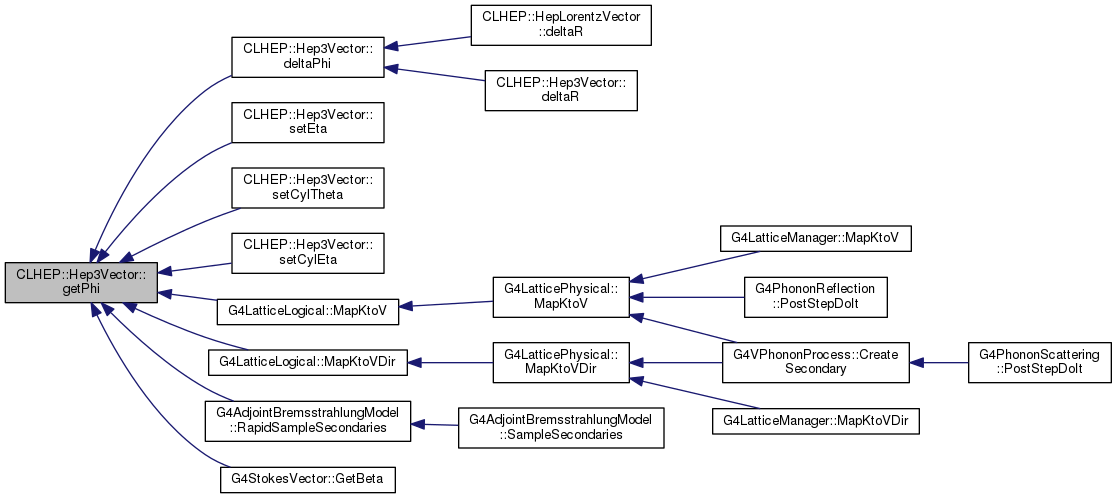
| double | getPhi () const |
| double | r () const |
| double | rho () const |
| double | getRho () const |
| double | eta () const |
| double | getEta () const |
| void | setR (double s) |
| void | setRho (double s) |
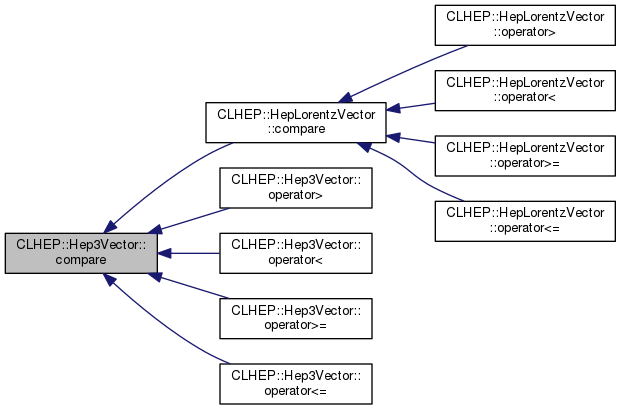
| int | compare (const Hep3Vector &v) const |
| bool | operator> (const Hep3Vector &v) const |
| bool | operator< (const Hep3Vector &v) const |
| bool | operator>= (const Hep3Vector &v) const |
| bool | operator<= (const Hep3Vector &v) const |
| double | diff2 (const Hep3Vector &v) const |
| bool | isParallel (const Hep3Vector &v, double epsilon=tolerance) const |
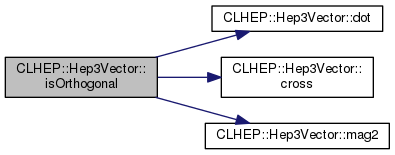
| bool | isOrthogonal (const Hep3Vector &v, double epsilon=tolerance) const |
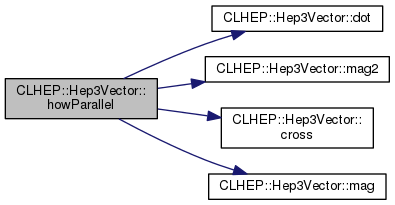
| double | howParallel (const Hep3Vector &v) const |
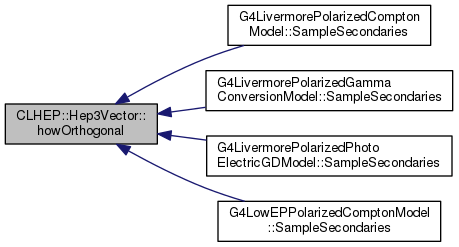
| double | howOrthogonal (const Hep3Vector &v) const |
| double | beta () const |
| double | gamma () const |
| double | coLinearRapidity () const |
| double | angle () const |
| double | theta (const Hep3Vector &v2) const |
| double | cosTheta (const Hep3Vector &v2) const |
| double | cos2Theta (const Hep3Vector &v2) const |
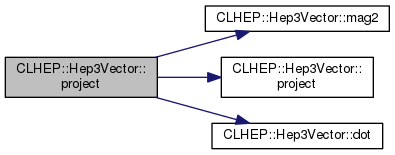
| Hep3Vector | project () const |
| Hep3Vector | project (const Hep3Vector &v2) const |
| Hep3Vector | perpPart () const |
| Hep3Vector | perpPart (const Hep3Vector &v2) const |
| double | rapidity () const |
| double | rapidity (const Hep3Vector &v2) const |
| double | eta (const Hep3Vector &v2) const |
| double | polarAngle (const Hep3Vector &v2) const |
| double | deltaPhi (const Hep3Vector &v2) const |
| double | azimAngle (const Hep3Vector &v2) const |
| double | polarAngle (const Hep3Vector &v2, const Hep3Vector &ref) const |
| double | azimAngle (const Hep3Vector &v2, const Hep3Vector &ref) const |
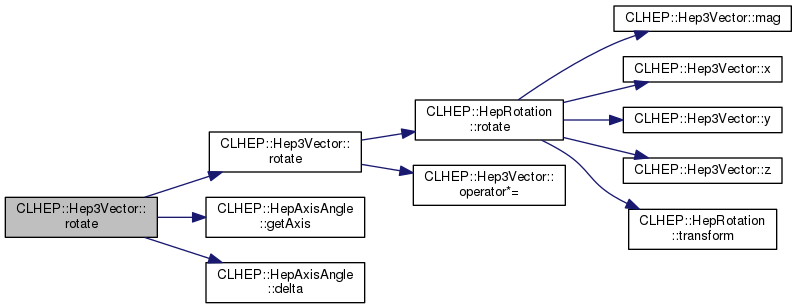
| Hep3Vector & | rotate (const Hep3Vector &axis, double delta) |
| Hep3Vector & | rotate (const HepAxisAngle &ax) |
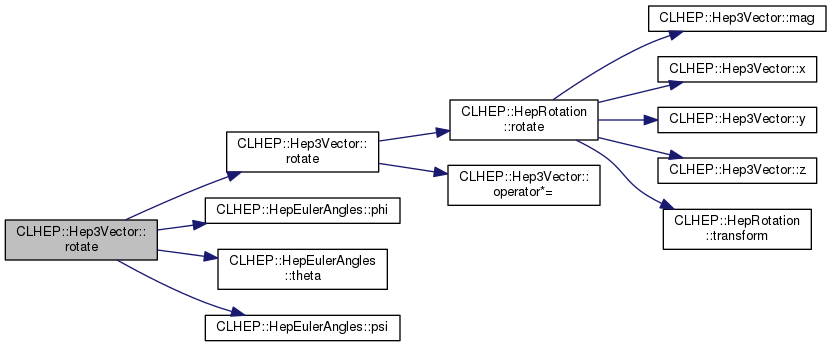
| Hep3Vector & | rotate (const HepEulerAngles &e) |
| Hep3Vector & | rotate (double phi, double theta, double psi) |
Static Public Member Functions | |
| static double | setTolerance (double tol) |
| static double | getTolerance () |
Protected Member Functions | |
| void | setSpherical (double r, double theta, double phi) |
| void | setCylindrical (double r, double phi, double z) |
| double | negativeInfinity () const |
Protected Attributes | |
| double | dx |
| double | dy |
| double | dz |
Static Protected Attributes | |
| static DLL_API double | tolerance = Hep3Vector::ToleranceTicks * 2.22045e-16 |
Definition at line 41 of file ThreeVector.h.
| anonymous enum |
| Enumerator | |
|---|---|
| X | |
| Y | |
| Z | |
| NUM_COORDINATES | |
| SIZE | |
Definition at line 47 of file ThreeVector.h.
| anonymous enum |
| CLHEP::Hep3Vector::Hep3Vector | ( | ) |
|
explicit |
| CLHEP::Hep3Vector::Hep3Vector | ( | double | x, |
| double | y | ||
| ) |
| CLHEP::Hep3Vector::Hep3Vector | ( | double | x, |
| double | y, | ||
| double | z | ||
| ) |
|
inline |
|
inline |
| double CLHEP::Hep3Vector::angle | ( | const Hep3Vector & | ) | const |
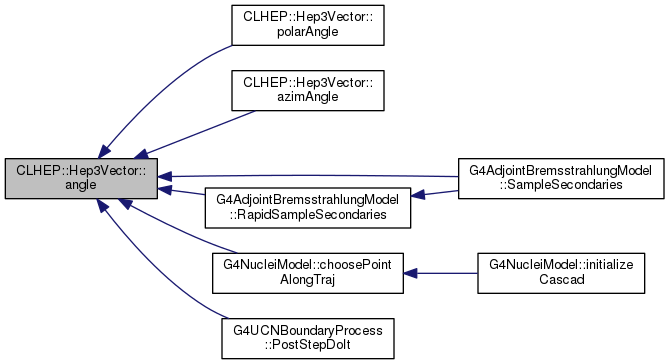
|
inline |

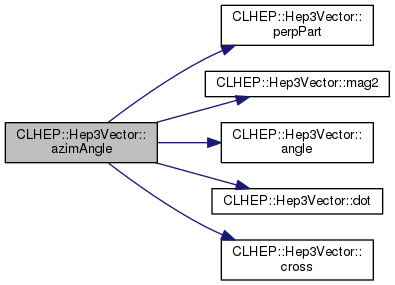
| double CLHEP::Hep3Vector::azimAngle | ( | const Hep3Vector & | v2 | ) | const |
| double CLHEP::Hep3Vector::azimAngle | ( | const Hep3Vector & | v2, |
| const Hep3Vector & | ref | ||
| ) | const |
Definition at line 40 of file SpaceVectorD.cc.
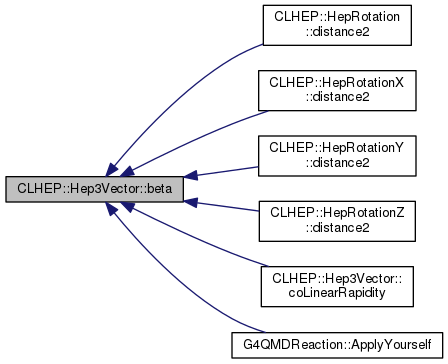
| double CLHEP::Hep3Vector::beta | ( | ) | const |
Definition at line 30 of file SpaceVectorP.cc.

| double CLHEP::Hep3Vector::coLinearRapidity | ( | ) | const |
| int CLHEP::Hep3Vector::compare | ( | const Hep3Vector & | v | ) | const |
|
inline |
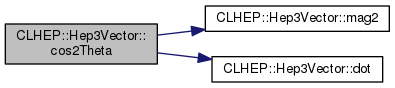
| double CLHEP::Hep3Vector::cos2Theta | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 167 of file ThreeVector.cc.
|
inline |

| double CLHEP::Hep3Vector::cosTheta | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 154 of file ThreeVector.cc.
|
inline |
| double CLHEP::Hep3Vector::deltaPhi | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 138 of file ThreeVector.cc.

| double CLHEP::Hep3Vector::deltaR | ( | const Hep3Vector & | v | ) | const |
Definition at line 148 of file ThreeVector.cc.

|
inline |
|
inline |
| double CLHEP::Hep3Vector::eta | ( | ) | const |

| double CLHEP::Hep3Vector::eta | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 117 of file SpaceVectorP.cc.
| double CLHEP::Hep3Vector::gamma | ( | ) | const |
Definition at line 39 of file SpaceVectorP.cc.

| double CLHEP::Hep3Vector::getEta | ( | ) | const |
|
inline |
|
inline |
|
inline |
|
inline |
|
inlinestatic |
|
inline |
|
inline |
|
inline |
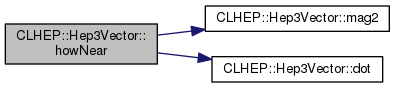
| double CLHEP::Hep3Vector::howNear | ( | const Hep3Vector & | v | ) | const |
Definition at line 125 of file ThreeVector.cc.
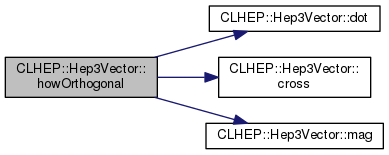
| double CLHEP::Hep3Vector::howOrthogonal | ( | const Hep3Vector & | v | ) | const |
Definition at line 219 of file SpaceVector.cc.
| double CLHEP::Hep3Vector::howParallel | ( | const Hep3Vector & | v | ) | const |
Definition at line 168 of file SpaceVector.cc.
| bool CLHEP::Hep3Vector::isNear | ( | const Hep3Vector & | v, |
| double | epsilon = tolerance |
||
| ) | const |
Definition at line 120 of file ThreeVector.cc.
| bool CLHEP::Hep3Vector::isOrthogonal | ( | const Hep3Vector & | v, |
| double | epsilon = tolerance |
||
| ) | const |
Definition at line 237 of file SpaceVector.cc.
| bool CLHEP::Hep3Vector::isParallel | ( | const Hep3Vector & | v, |
| double | epsilon = tolerance |
||
| ) | const |
Definition at line 184 of file SpaceVector.cc.
|
inline |
|
inline |
|
protected |
|
inline |
|
inline |
|
inline |
|
inline |
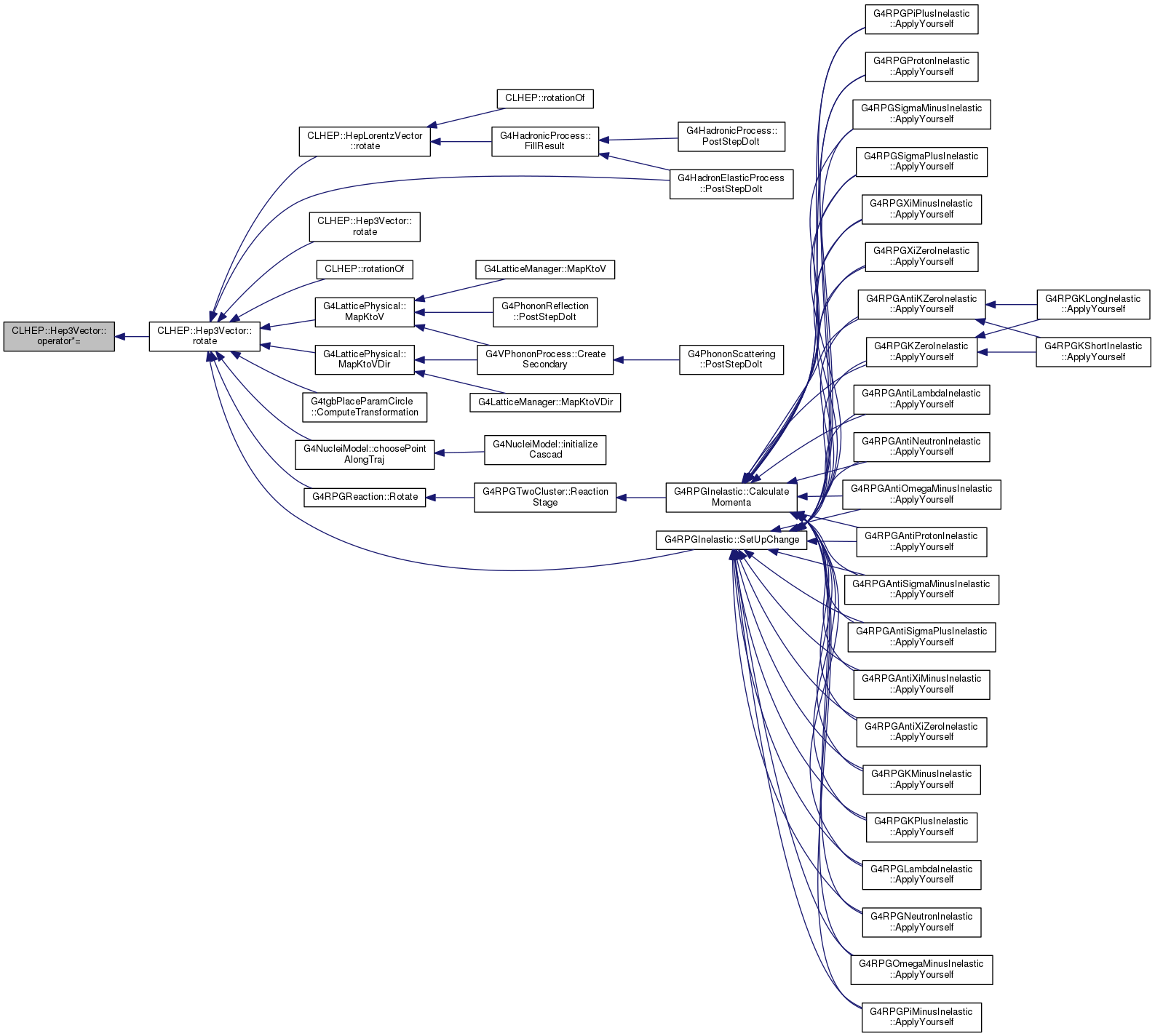
| Hep3Vector & CLHEP::Hep3Vector::operator*= | ( | const HepRotation & | m1 | ) |
Definition at line 20 of file ThreeVectorR.cc.
|
inline |
|
inline |
|
inline |
| Hep3Vector & CLHEP::Hep3Vector::operator/= | ( | double | c | ) |
Definition at line 313 of file ThreeVector.cc.
| bool CLHEP::Hep3Vector::operator< | ( | const Hep3Vector & | v | ) | const |
| bool CLHEP::Hep3Vector::operator<= | ( | const Hep3Vector & | v | ) | const |
|
inline |
|
inline |
| bool CLHEP::Hep3Vector::operator> | ( | const Hep3Vector & | v | ) | const |
| bool CLHEP::Hep3Vector::operator>= | ( | const Hep3Vector & | v | ) | const |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |

|
inline |
|
inline |
| double CLHEP::Hep3Vector::polarAngle | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 28 of file SpaceVectorD.cc.

| double CLHEP::Hep3Vector::polarAngle | ( | const Hep3Vector & | v2, |
| const Hep3Vector & | ref | ||
| ) | const |
Definition at line 32 of file SpaceVectorD.cc.

|
inline |

| Hep3Vector CLHEP::Hep3Vector::project | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 89 of file SpaceVectorP.cc.
| double CLHEP::Hep3Vector::pseudoRapidity | ( | ) | const |
Definition at line 58 of file ThreeVector.cc.
|
inline |
| double CLHEP::Hep3Vector::rapidity | ( | ) | const |
Definition at line 54 of file SpaceVectorP.cc.
| double CLHEP::Hep3Vector::rapidity | ( | const Hep3Vector & | v2 | ) | const |
Definition at line 100 of file SpaceVectorP.cc.
|
inline |
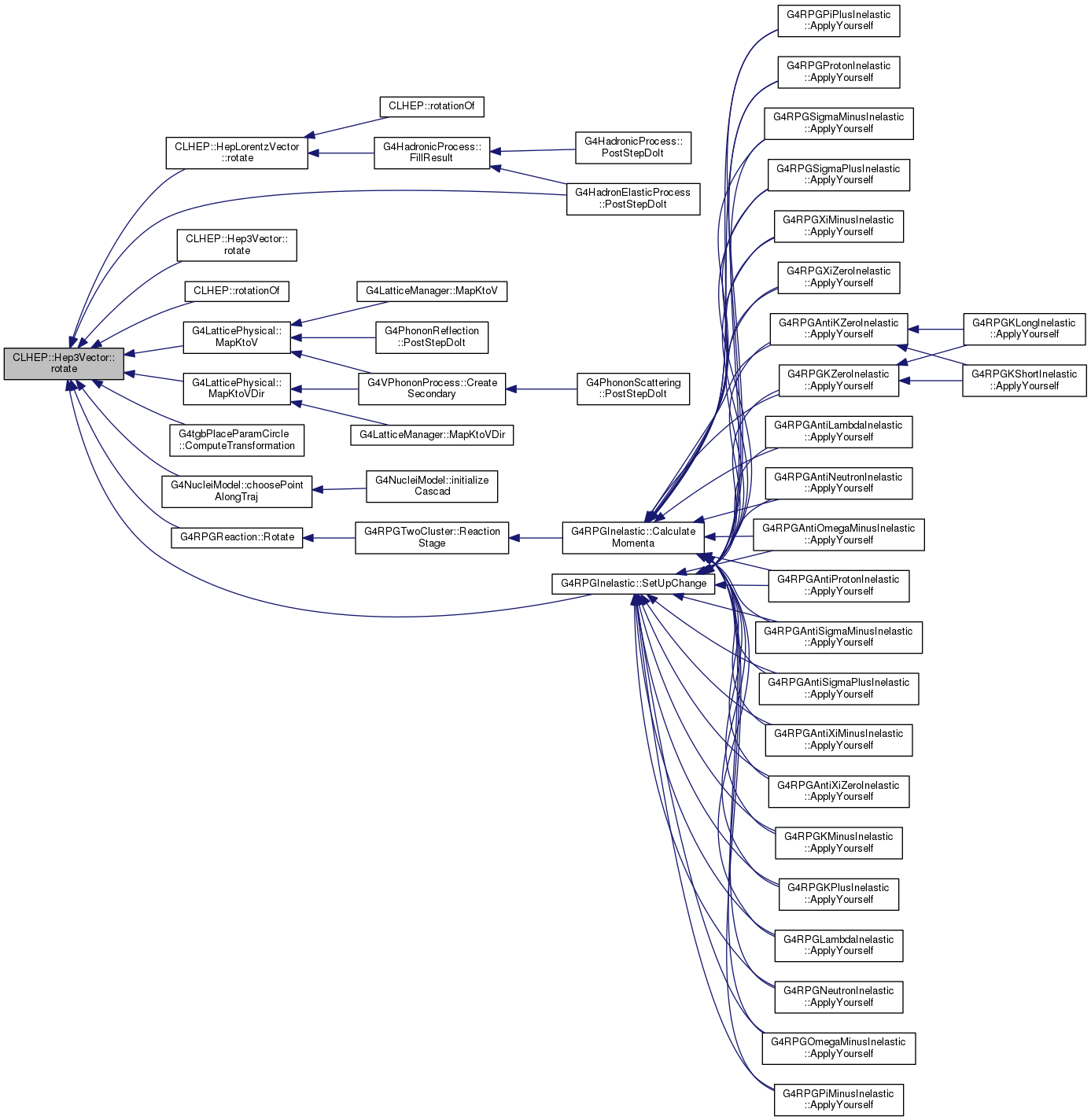
| Hep3Vector & CLHEP::Hep3Vector::rotate | ( | double | angle1, |
| const Hep3Vector & | aaxis | ||
| ) |
Definition at line 28 of file ThreeVectorR.cc.
| Hep3Vector & CLHEP::Hep3Vector::rotate | ( | const Hep3Vector & | axis, |
| double | delta | ||
| ) |
| Hep3Vector & CLHEP::Hep3Vector::rotate | ( | const HepAxisAngle & | ax | ) |
Definition at line 112 of file SpaceVectorR.cc.
| Hep3Vector & CLHEP::Hep3Vector::rotate | ( | const HepEulerAngles & | e | ) |
Definition at line 116 of file SpaceVectorR.cc.
| Hep3Vector & CLHEP::Hep3Vector::rotate | ( | double | phi, |
| double | theta, | ||
| double | psi | ||
| ) |
Definition at line 74 of file SpaceVectorR.cc.
| Hep3Vector & CLHEP::Hep3Vector::rotateUz | ( | const Hep3Vector & | NewUzVector | ) |
| Hep3Vector & CLHEP::Hep3Vector::rotateX | ( | double | phi1 | ) |
| Hep3Vector & CLHEP::Hep3Vector::rotateY | ( | double | phi1 | ) |
| Hep3Vector & CLHEP::Hep3Vector::rotateZ | ( | double | phi1 | ) |
|
inline |
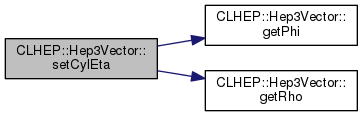
| void CLHEP::Hep3Vector::setCylEta | ( | double | p | ) |
Definition at line 259 of file ThreeVector.cc.
|
protected |
Definition at line 56 of file SpaceVector.cc.
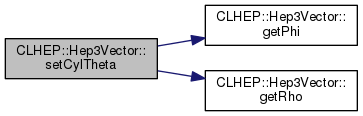
| void CLHEP::Hep3Vector::setCylTheta | ( | double | theta1 | ) |
Definition at line 211 of file ThreeVector.cc.
| void CLHEP::Hep3Vector::setEta | ( | double | p | ) |
Definition at line 183 of file ThreeVector.cc.
| void CLHEP::Hep3Vector::setMag | ( | double | ma | ) |
Definition at line 25 of file ThreeVector.cc.

|
inline |
|
inline |

|
inline |

|
inline |
|
inline |
| void CLHEP::Hep3Vector::setRhoPhiEta | ( | double | rho, |
| double | phi, | ||
| double | eta | ||
| ) |
Definition at line 98 of file SpaceVector.cc.
| void CLHEP::Hep3Vector::setRhoPhiTheta | ( | double | rho, |
| double | phi, | ||
| double | theta | ||
| ) |
Definition at line 71 of file SpaceVector.cc.
|
inline |
|
inline |
|
protected |
Definition at line 35 of file SpaceVector.cc.
|
inline |

|
static |
Definition at line 271 of file SpaceVector.cc.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
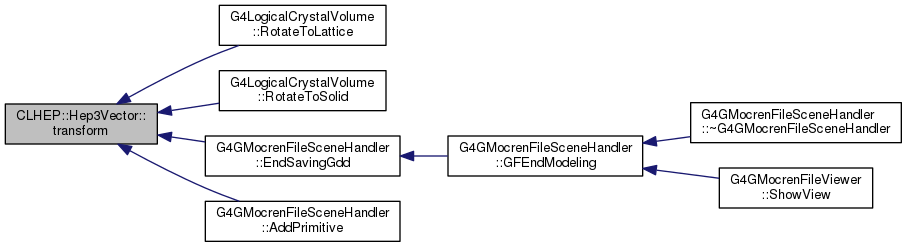
| Hep3Vector & CLHEP::Hep3Vector::transform | ( | const HepRotation & | m1 | ) |
|
inline |
|
inline |
|
inline |
|
inline |
|
protected |
Definition at line 394 of file ThreeVector.h.
|
protected |
Definition at line 395 of file ThreeVector.h.
|
protected |
Definition at line 396 of file ThreeVector.h.
|
staticprotected |
Definition at line 399 of file ThreeVector.h.
 1.8.5
1.8.5