|
Geant4
10.03.p01
|
|
Geant4
10.03.p01
|
#include <G4Trd.hh>
Public Types | |
| enum | ESide { kUndefined, kPX, kMX, kPY, kMY, kPZ, kMZ } |
Additional Inherited Members | |
 Protected Member Functions inherited from G4CSGSolid Protected Member Functions inherited from G4CSGSolid | |
| G4double | GetRadiusInRing (G4double rmin, G4double rmax) const |
| Protected Member Functions inherited from G4VSolid | |
| void | CalculateClippedPolygonExtent (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipCrossSection (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipBetweenSections (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipPolygon (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis) const |
| Protected Attributes inherited from G4CSGSolid | |
| G4double | fCubicVolume |
| G4double | fSurfaceArea |
| G4bool | fRebuildPolyhedron |
| G4Polyhedron * | fpPolyhedron |
| Protected Attributes inherited from G4VSolid | |
| G4double | kCarTolerance |
| enum G4Trd::ESide |
| Enumerator | |
|---|---|
| kUndefined | |
| kPX | |
| kMX | |
| kPY | |
| kMY | |
| kPZ | |
| kMZ | |
Definition at line 159 of file G4Trd.hh.
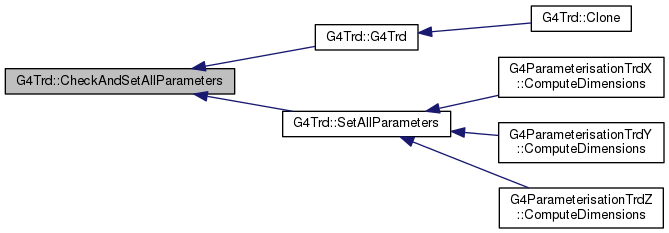
| G4Trd::G4Trd | ( | const G4String & | pName, |
| G4double | pdx1, | ||
| G4double | pdx2, | ||
| G4double | pdy1, | ||
| G4double | pdy2, | ||
| G4double | pdz | ||
| ) |
Definition at line 64 of file G4Trd.cc.

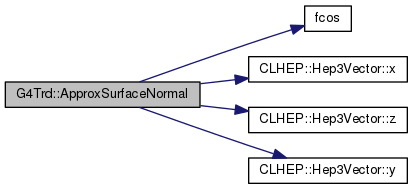
| G4ThreeVector G4Trd::ApproxSurfaceNormal | ( | const G4ThreeVector & | p | ) | const |
Definition at line 410 of file G4Trd.cc.

|
virtual |
Implements G4VSolid.
Definition at line 227 of file G4Trd.cc.
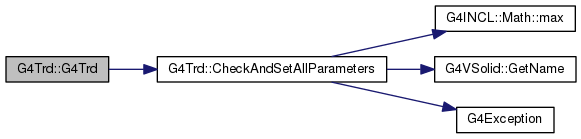
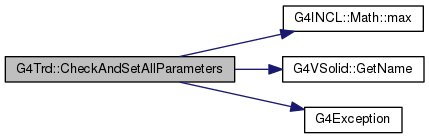
| void G4Trd::CheckAndSetAllParameters | ( | G4double | pdx1, |
| G4double | pdx2, | ||
| G4double | pdy1, | ||
| G4double | pdy2, | ||
| G4double | pdz | ||
| ) |
Definition at line 77 of file G4Trd.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 1229 of file G4Trd.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 185 of file G4Trd.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 1333 of file G4Trd.cc.
|
virtual |
|
virtual |
|
virtual |
|
virtual |
Implements G4VSolid.
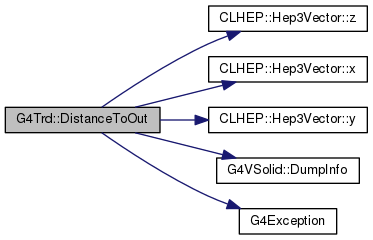
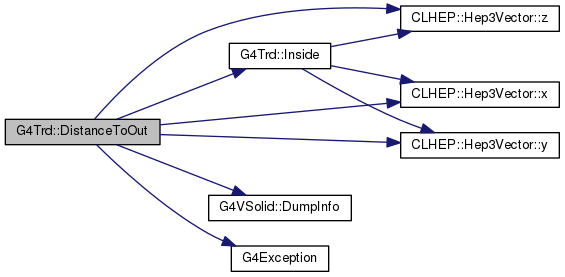
Definition at line 776 of file G4Trd.cc.
|
virtual |
Implements G4VSolid.
Definition at line 1168 of file G4Trd.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 196 of file G4Trd.cc.

|
virtual |
|
virtual |
|
inline |

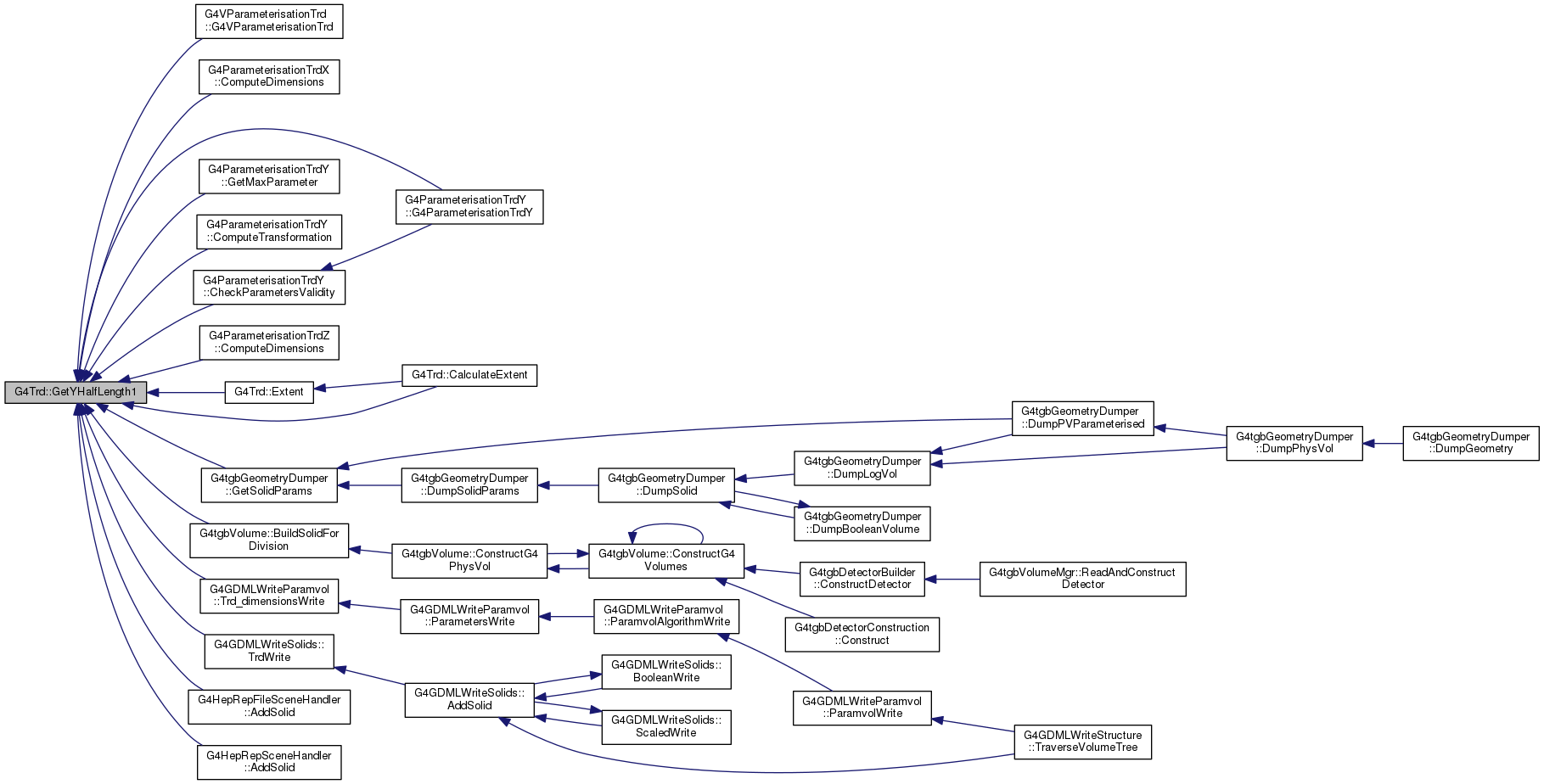
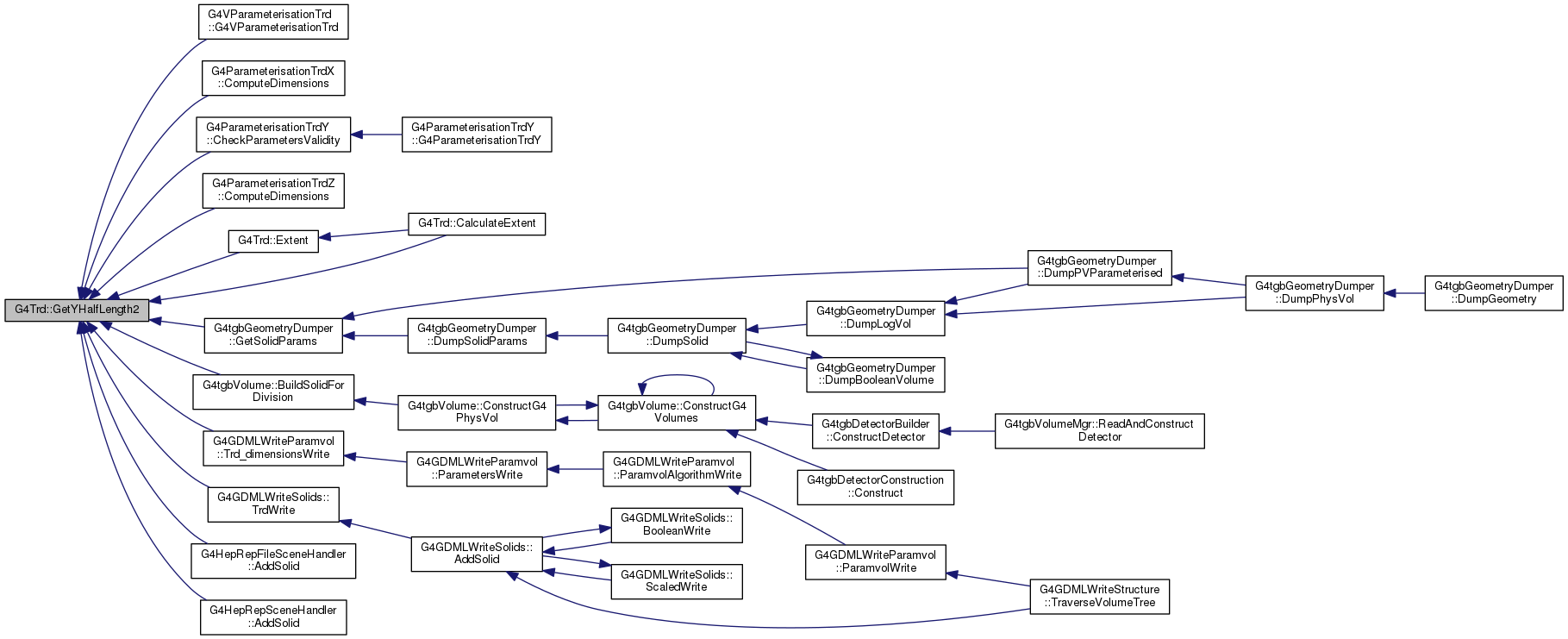
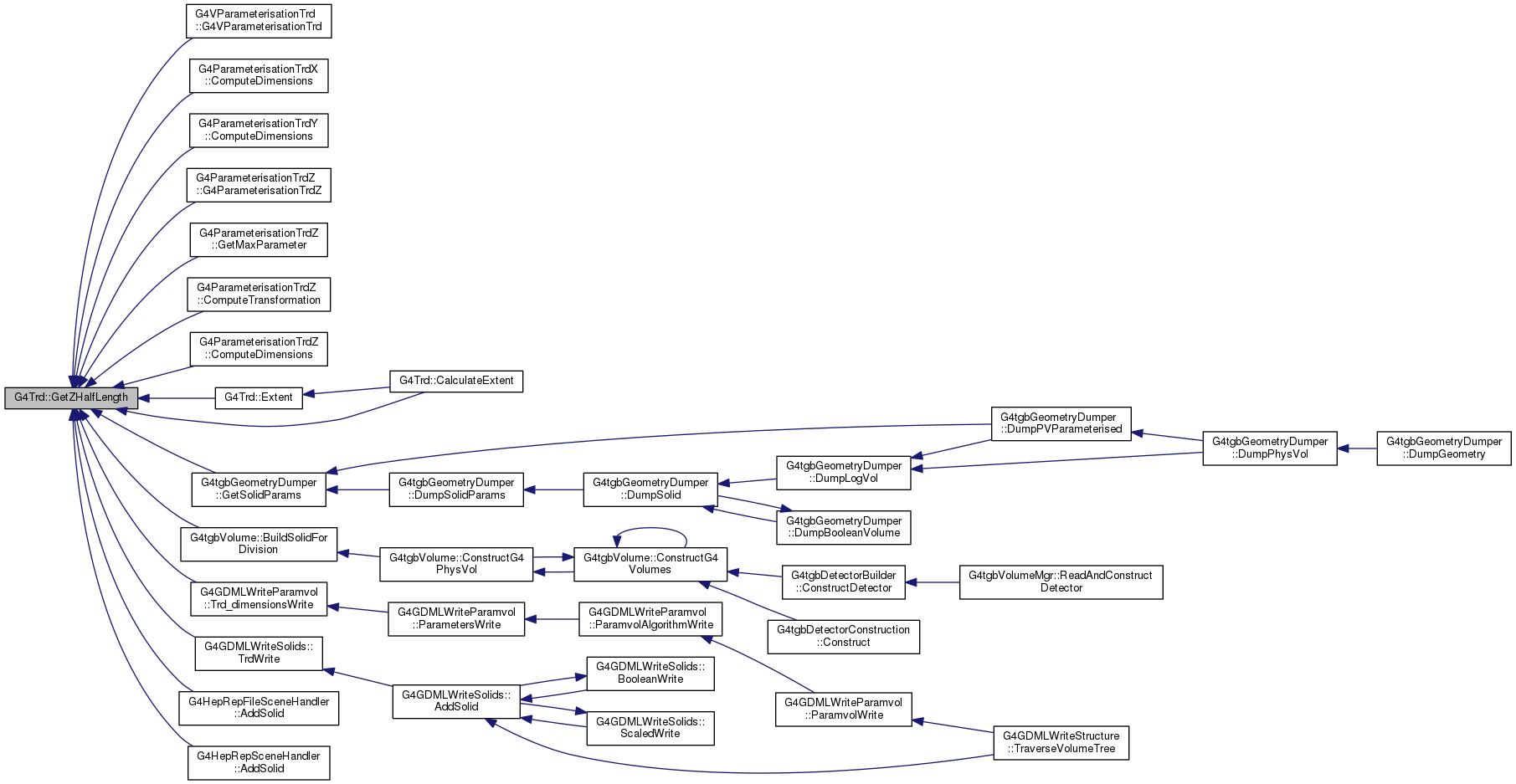
|
inline |
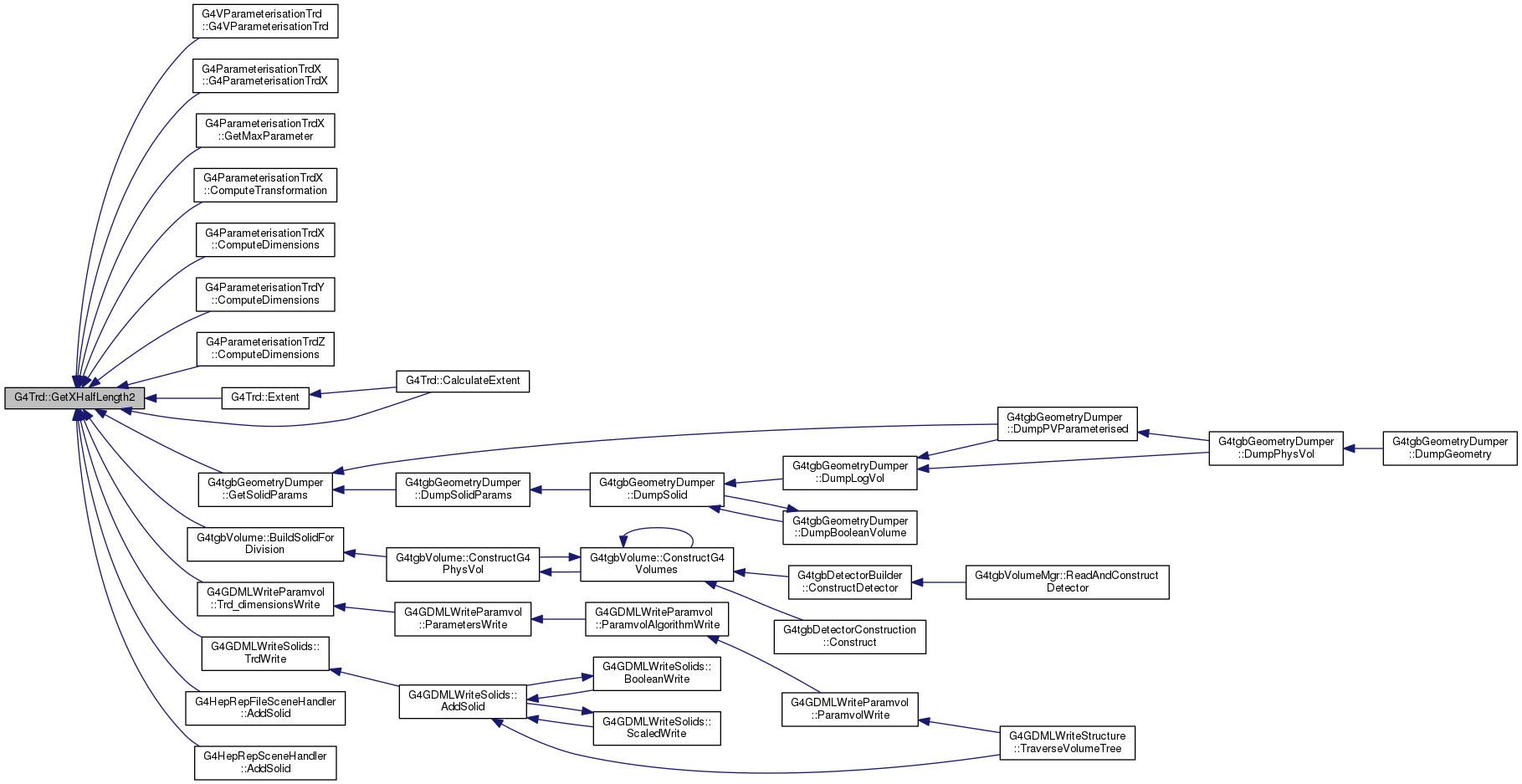
|
inline |
|
inline |
|
inline |
|
virtual |
Implements G4VSolid.
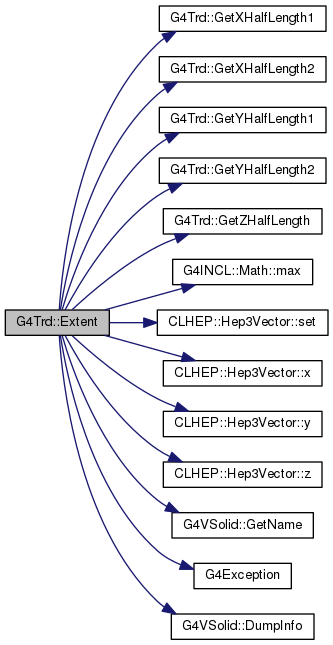
Definition at line 278 of file G4Trd.cc.

| void G4Trd::SetAllParameters | ( | G4double | pdx1, |
| G4double | pdx2, | ||
| G4double | pdy1, | ||
| G4double | pdy2, | ||
| G4double | pdz | ||
| ) |
Definition at line 173 of file G4Trd.cc.
|
virtual |
Reimplemented from G4CSGSolid.
Definition at line 1238 of file G4Trd.cc.

|
virtual |
Implements G4VSolid.
Definition at line 341 of file G4Trd.cc.
 1.8.5
1.8.5