981 if (
true)
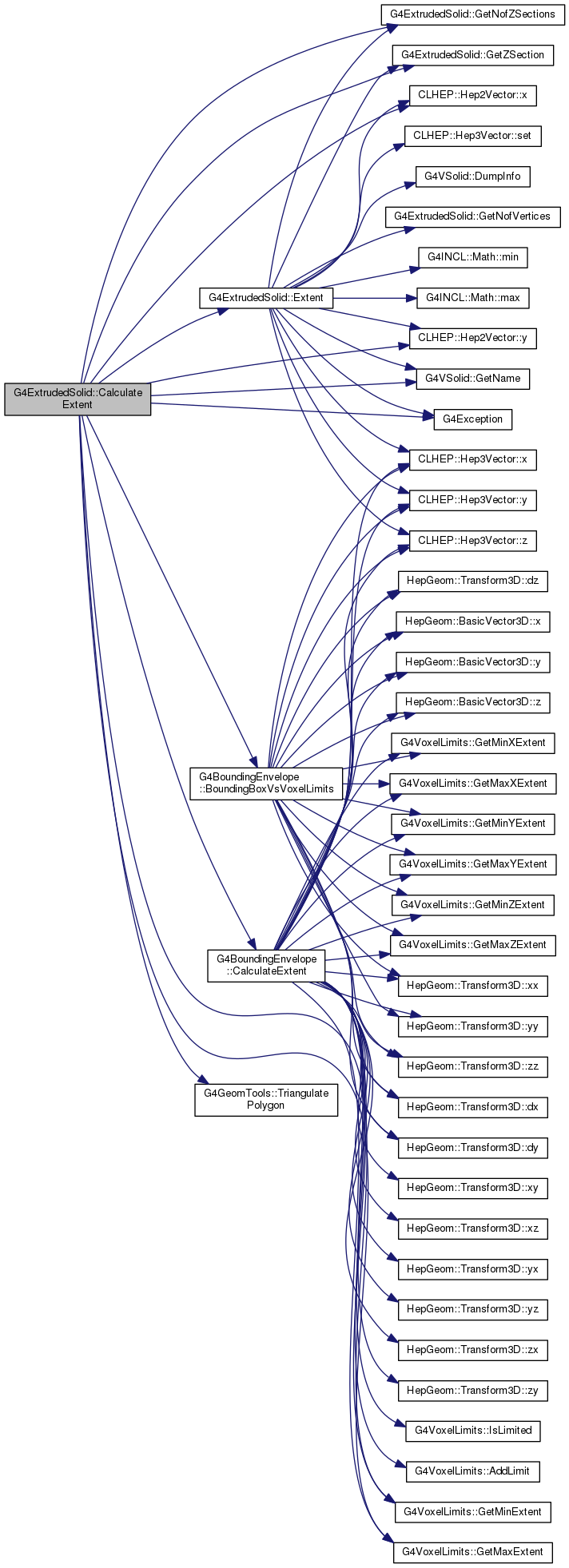
return bbox.CalculateExtent(pAxis,pVoxelLimit,pTransform,pMin,pMax);
983 if (bbox.BoundingBoxVsVoxelLimits(pAxis,pVoxelLimit,pTransform,pMin,pMax))
985 return exist = (pMin < pMax) ?
true :
false;
999 std::ostringstream message;
1000 message <<
"Triangulation of the base polygon has failed for solid: "
1002 <<
"\nExtent has been calculated using boundary box";
1005 return bbox.CalculateExtent(pAxis,pVoxelLimit,pTransform,pMin,pMax);
1010 std::vector<const G4ThreeVectorList *> polygons;
1011 polygons.resize(nsect);
1017 G4int ntria = triangles.size()/3;
1018 for (
G4int i=0; i<ntria; ++i)
1021 for (
G4int k=0; k<nsect; ++k)
1030 G4ThreeVectorList::iterator iter = ptr->begin();
1031 G4double x0 = triangles[i3+0].x()*scale+dx;
1032 G4double y0 = triangles[i3+0].y()*scale+dy;
1035 G4double x1 = triangles[i3+1].x()*scale+dx;
1036 G4double y1 = triangles[i3+1].y()*scale+dy;
1039 G4double x2 = triangles[i3+2].x()*scale+dx;
1040 G4double y2 = triangles[i3+2].y()*scale+dy;
1047 if (!benv.CalculateExtent(pAxis,pVoxelLimit,pTransform,emin,emax))
continue;
1048 if (emin < pMin) pMin = emin;
1049 if (emax > pMax) pMax =
emax;
1050 if (eminlim > pMin && emaxlim < pMax)
break;
1053 for (
G4int k=0; k<nsect; ++k) {
delete polygons[k]; polygons[k]=0;}
1054 return (pMin < pMax);
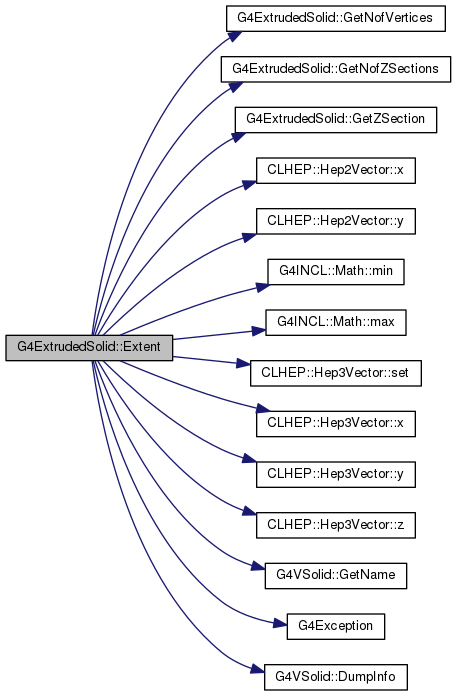
void Extent(G4ThreeVector &pMin, G4ThreeVector &pMax) const
static const G4double kInfinity
std::vector< G4ThreeVector > G4ThreeVectorList
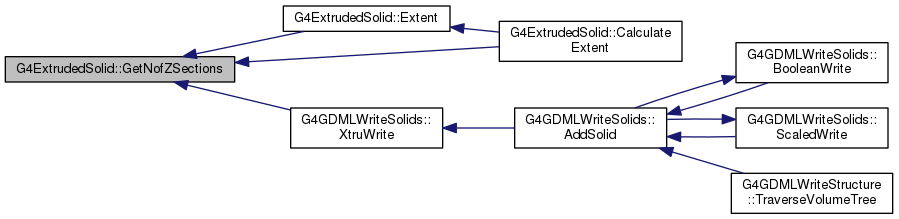
G4int GetNofZSections() const
void G4Exception(const char *originOfException, const char *exceptionCode, G4ExceptionSeverity severity, const char *comments)
static const G4double emax
ZSection GetZSection(G4int index) const
G4double GetMaxExtent(const EAxis pAxis) const
G4double GetMinExtent(const EAxis pAxis) const
 Protected Member Functions inherited from G4VSolid
Protected Member Functions inherited from G4VSolid




 1.8.5
1.8.5 
