423 if (sigz < halfCarTol)
442 if (
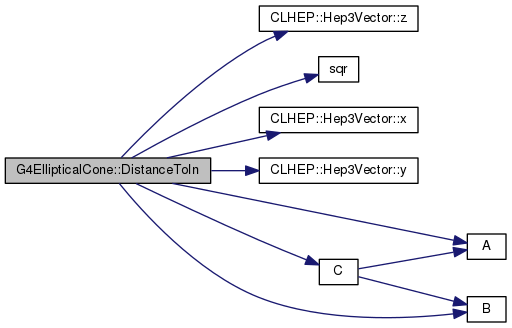
sqr(p.
x()/( xSemiAxis - halfCarTol ))
443 +
sqr(p.
y()/( ySemiAxis - halfCarTol )) <=
sqr( zheight+zTopCut ) )
458 yi = p.
y() + q*v.
y();
463 if (
sqr(xi/xSemiAxis) +
sqr(yi/ySemiAxis) <=
sqr( zheight + zTopCut ) )
468 return (sigz < -halfCarTol) ? q : 0;
470 else if (xi/(xSemiAxis*xSemiAxis)*v.
x()
471 + yi/(ySemiAxis*ySemiAxis)*v.
y() >= 0)
485 sigz = p.
z() - zTopCut;
487 if (sigz > -halfCarTol)
494 if (
sqr(p.
x()/( xSemiAxis - halfCarTol ))
495 +
sqr(p.
y()/( ySemiAxis - halfCarTol )) <=
sqr( zheight-zTopCut ) )
503 yi = p.
y() + q*v.
y();
505 if (
sqr(xi/xSemiAxis) +
sqr(yi/ySemiAxis) <=
sqr( zheight - zTopCut ) )
507 return (sigz > -halfCarTol) ? q : 0;
509 else if (xi/(xSemiAxis*xSemiAxis)*v.
x()
510 + yi/(ySemiAxis*ySemiAxis)*v.
y() >= 0)
529 if (
sqr((lambda*v.
x()+p.
x())/xSemiAxis) +
530 sqr((lambda*v.
y()+p.
y())/ySemiAxis) <=
531 sqr(zTopCut + zheight + 0.5*kRadTolerance) )
533 return distMin = std::fabs(lambda);
544 if (
sqr((lambda*v.
x() + p.
x())/xSemiAxis) +
545 sqr((lambda*v.
y() + p.
y())/ySemiAxis) <=
546 sqr(zheight - zTopCut + 0.5*kRadTolerance) )
548 return distMin = std::fabs(lambda);
552 if (p.
z() > zTopCut - halfCarTol
553 && p.
z() < zTopCut + halfCarTol )
561 if (p.
z() < -zTopCut + halfCarTol
562 && p.
z() > -zTopCut - halfCarTol)
577 v.
y()*p.
y()/
sqr(ySemiAxis) + v.
z()*(zheight-p.
z()));
579 sqr(zheight - p.
z());
585 if ( discr < -halfCarTol )
590 if ( (discr >= - halfCarTol ) && (discr < halfCarTol ) )
592 return distMin = std::fabs(-B/(2.*A));
595 G4double plus = (-B+std::sqrt(discr))/(2.*A);
596 G4double minus = (-B-std::sqrt(discr))/(2.*A);
600 if ( ( std::fabs(plus) < halfCarTol )||( std::fabs(minus) < halfCarTol ) )
603 p.
y()/(ySemiAxis*ySemiAxis),
604 -( p.
z() - zheight ));
605 if ( truenorm*v >= 0)
618 if ( minus > halfCarTol && minus < distMin )
626 pin.
y()/(ySemiAxis*ySemiAxis),
627 - ( pin.
z() - zheight ));
634 if ( plus > halfCarTol && plus < distMin )
642 pin.
y()/(ySemiAxis*ySemiAxis),
643 - ( pin.
z() - zheight ) );
650 if (distMin < halfCarTol) distMin=0.;
static const G4double kInfinity
double B(double temperature)
double A(double temperature)
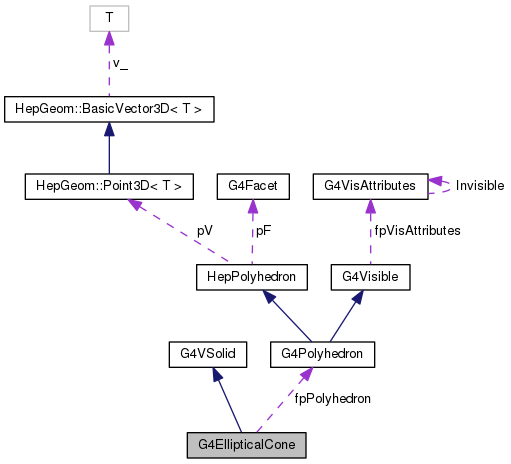
 Protected Attributes inherited from G4VSolid
Protected Attributes inherited from G4VSolid


















 1.8.5
1.8.5 

