|
Geant4
10.03.p01
|
|
Geant4
10.03.p01
|
#include <G4GenericTrap.hh>
Protected Attributes | |
| G4bool | fRebuildPolyhedron |
| G4Polyhedron * | fpPolyhedron |
 Protected Attributes inherited from G4VSolid Protected Attributes inherited from G4VSolid | |
| G4double | kCarTolerance |
Additional Inherited Members | |
| Protected Member Functions inherited from G4VSolid | |
| void | CalculateClippedPolygonExtent (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipCrossSection (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipBetweenSections (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipPolygon (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis) const |
Definition at line 88 of file G4GenericTrap.hh.
| G4GenericTrap::G4GenericTrap | ( | const G4String & | name, |
| G4double | halfZ, | ||
| const std::vector< G4TwoVector > & | vertices | ||
| ) |
Definition at line 81 of file G4GenericTrap.cc.


| G4GenericTrap::~G4GenericTrap | ( | ) |
Definition at line 196 of file G4GenericTrap.cc.
| G4GenericTrap::G4GenericTrap | ( | __void__ & | a | ) |
Definition at line 175 of file G4GenericTrap.cc.
| G4GenericTrap::G4GenericTrap | ( | const G4GenericTrap & | rhs | ) |
Definition at line 204 of file G4GenericTrap.cc.
|
virtual |
Implements G4VSolid.
Definition at line 1237 of file G4GenericTrap.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 1303 of file G4GenericTrap.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 2033 of file G4GenericTrap.cc.

|
virtual |
Implements G4VSolid.
Definition at line 1998 of file G4GenericTrap.cc.

|
virtual |
Implements G4VSolid.
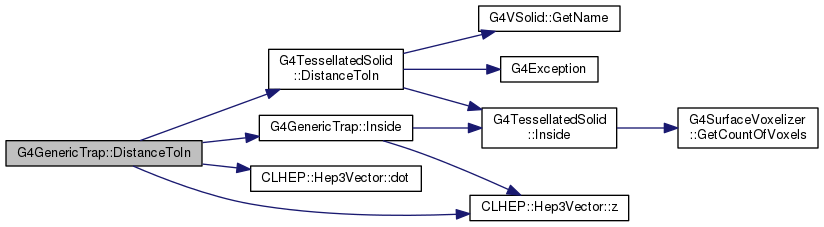
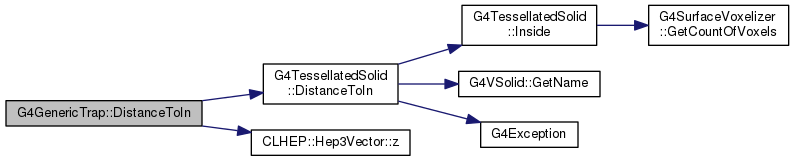
Definition at line 771 of file G4GenericTrap.cc.
|
virtual |
Implements G4VSolid.
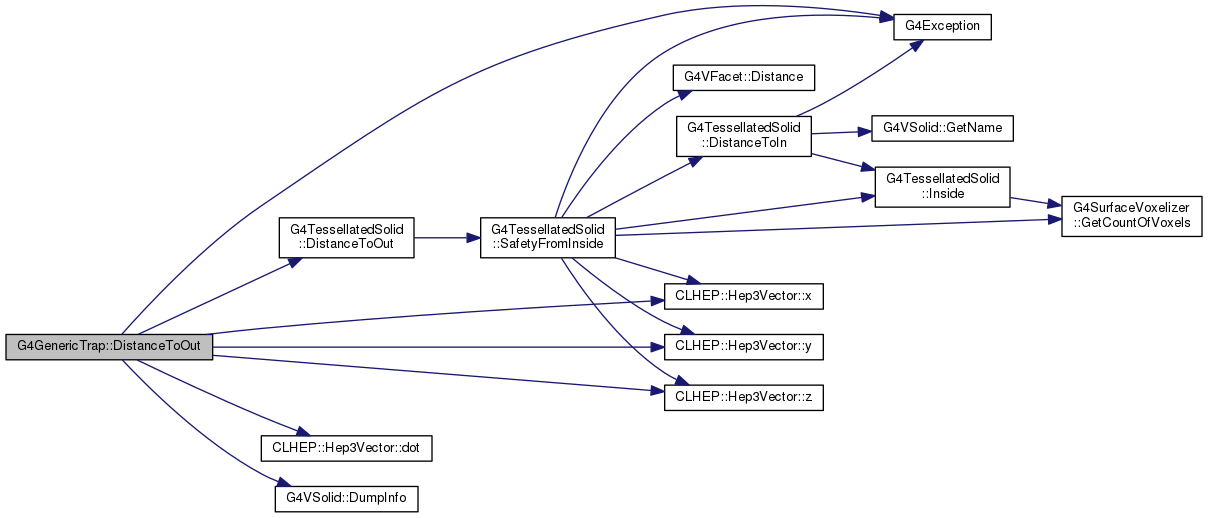
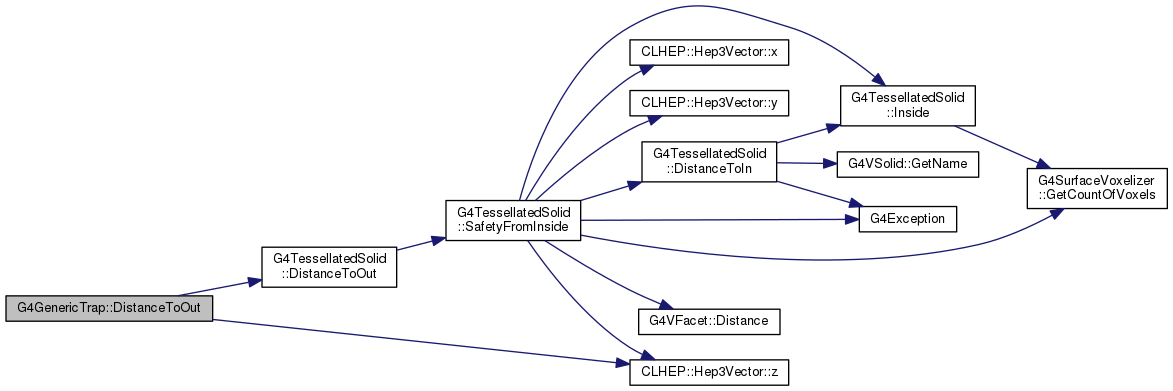
Definition at line 839 of file G4GenericTrap.cc.
|
virtual |
Implements G4VSolid.
Definition at line 943 of file G4GenericTrap.cc.
|
virtual |
Implements G4VSolid.
Definition at line 1188 of file G4GenericTrap.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 1215 of file G4GenericTrap.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 1451 of file G4GenericTrap.cc.

|
virtual |
Implements G4VSolid.
Definition at line 1296 of file G4GenericTrap.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 2013 of file G4GenericTrap.cc.
|
inline |
|
virtual |
Reimplemented from G4VSolid.
Definition at line 1333 of file G4GenericTrap.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 1972 of file G4GenericTrap.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 1421 of file G4GenericTrap.cc.

|
inline |

|
inline |
|
inline |

|
inline |
|
virtual |
Implements G4VSolid.
Definition at line 357 of file G4GenericTrap.cc.


|
inline |
| G4GenericTrap & G4GenericTrap::operator= | ( | const G4GenericTrap & | rhs | ) |
|
virtual |
Implements G4VSolid.
Definition at line 1310 of file G4GenericTrap.cc.

|
virtual |
Implements G4VSolid.
Definition at line 393 of file G4GenericTrap.cc.
|
mutableprotected |
Definition at line 204 of file G4GenericTrap.hh.
|
mutableprotected |
Definition at line 203 of file G4GenericTrap.hh.
 1.8.5
1.8.5 

