|
Geant4
10.03.p01
|
|
Geant4
10.03.p01
|
#include <G4EllipticalTube.hh>
Protected Member Functions | |
| G4double | CheckXY (const G4double x, const G4double y, const G4double toler) const |
| G4double | CheckXY (const G4double x, const G4double y) const |
| G4int | IntersectXY (const G4ThreeVector &p, const G4ThreeVector &v, G4double s[2]) const |
 Protected Member Functions inherited from G4VSolid Protected Member Functions inherited from G4VSolid | |
| void | CalculateClippedPolygonExtent (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipCrossSection (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipBetweenSections (G4ThreeVectorList *pVertices, const G4int pSectionIndex, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis, G4double &pMin, G4double &pMax) const |
| void | ClipPolygon (G4ThreeVectorList &pPolygon, const G4VoxelLimits &pVoxelLimit, const EAxis pAxis) const |
Protected Attributes | |
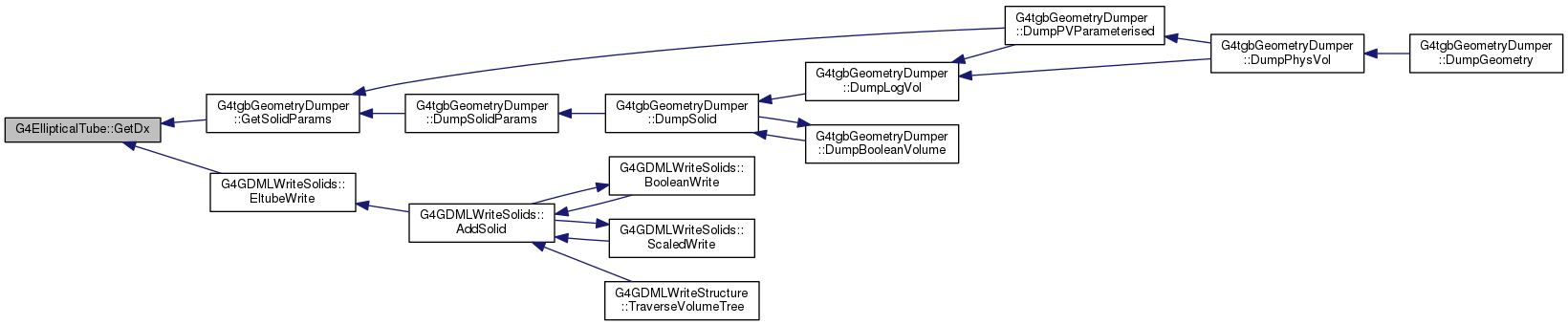
| G4double | dx |
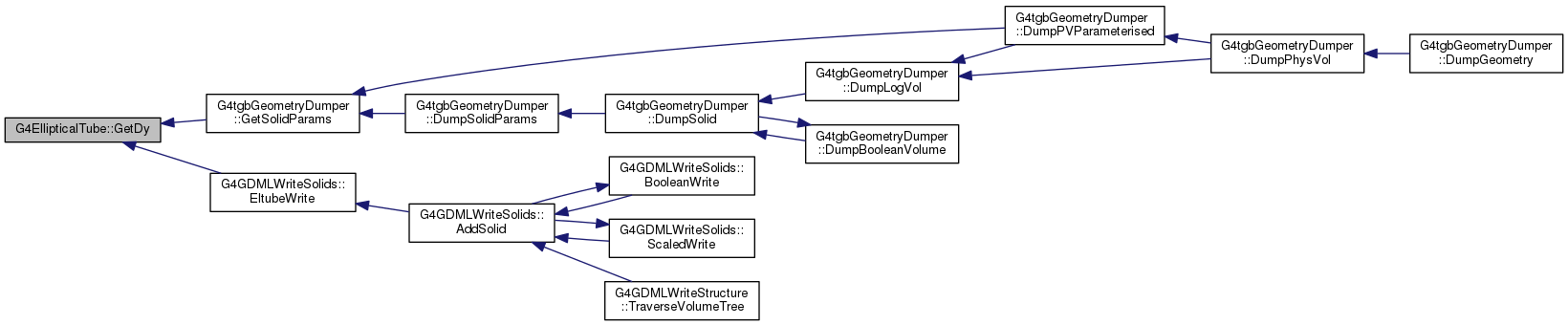
| G4double | dy |
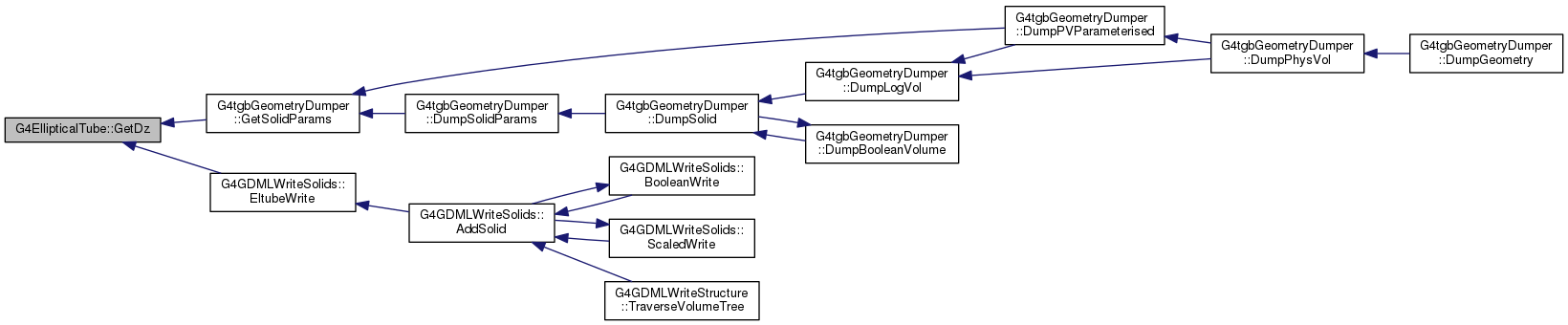
| G4double | dz |
| Protected Attributes inherited from G4VSolid | |
| G4double | kCarTolerance |
Definition at line 56 of file G4EllipticalTube.hh.
| G4EllipticalTube::G4EllipticalTube | ( | const G4String & | name, |
| G4double | theDx, | ||
| G4double | theDy, | ||
| G4double | theDz | ||
| ) |
|
virtual |
Definition at line 97 of file G4EllipticalTube.cc.
| G4EllipticalTube::G4EllipticalTube | ( | __void__ & | a | ) |
Definition at line 86 of file G4EllipticalTube.cc.
| G4EllipticalTube::G4EllipticalTube | ( | const G4EllipticalTube & | rhs | ) |
Definition at line 106 of file G4EllipticalTube.cc.
|
virtual |
Implements G4VSolid.
Definition at line 154 of file G4EllipticalTube.cc.
|
inlineprotected |
|
virtual |
Reimplemented from G4VSolid.
Definition at line 811 of file G4EllipticalTube.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 914 of file G4EllipticalTube.cc.


|
virtual |
Implements G4VSolid.
Definition at line 950 of file G4EllipticalTube.cc.

|
virtual |
Implements G4VSolid.
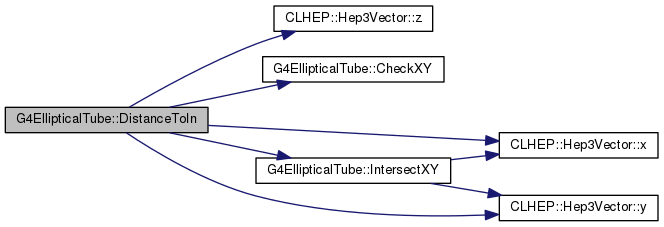
Definition at line 328 of file G4EllipticalTube.cc.
|
virtual |
Implements G4VSolid.
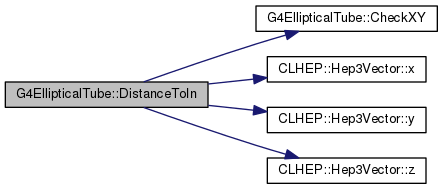
Definition at line 484 of file G4EllipticalTube.cc.
|
virtual |
Implements G4VSolid.
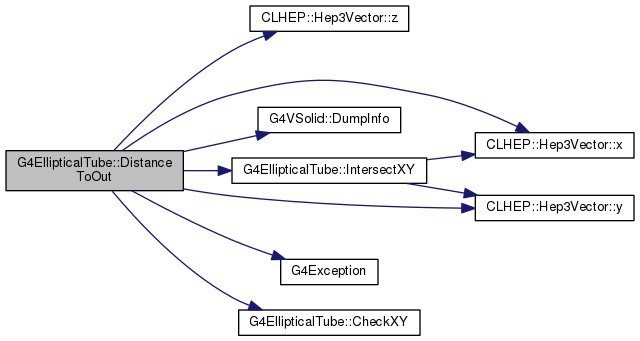
Definition at line 545 of file G4EllipticalTube.cc.
|
virtual |
Implements G4VSolid.
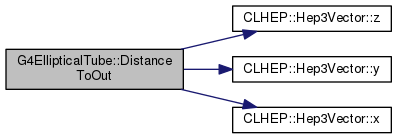
Definition at line 684 of file G4EllipticalTube.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 142 of file G4EllipticalTube.cc.


|
virtual |
Reimplemented from G4VSolid.
Definition at line 820 of file G4EllipticalTube.cc.

|
inline |
|
inline |
|
inline |
|
virtual |
Implements G4VSolid.
Definition at line 802 of file G4EllipticalTube.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 959 of file G4EllipticalTube.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 864 of file G4EllipticalTube.cc.

|
virtual |
Reimplemented from G4VSolid.
Definition at line 930 of file G4EllipticalTube.cc.
|
virtual |
Reimplemented from G4VSolid.
Definition at line 830 of file G4EllipticalTube.cc.
|
virtual |
Implements G4VSolid.
Definition at line 214 of file G4EllipticalTube.cc.
|
protected |
Definition at line 763 of file G4EllipticalTube.cc.
| G4EllipticalTube & G4EllipticalTube::operator= | ( | const G4EllipticalTube & | rhs | ) |
|
virtual |
Implements G4VSolid.
Definition at line 840 of file G4EllipticalTube.cc.

|
virtual |
Implements G4VSolid.
Definition at line 246 of file G4EllipticalTube.cc.
|
protected |
Definition at line 131 of file G4EllipticalTube.hh.
|
protected |
Definition at line 131 of file G4EllipticalTube.hh.
|
protected |
Definition at line 131 of file G4EllipticalTube.hh.
 1.8.5
1.8.5 


