|
Geant4
10.03.p03
|
|
Geant4
10.03.p03
|
#include <G4tgbRotationMatrix.hh>
Public Member Functions | |
| G4tgbRotationMatrix () | |
| ~G4tgbRotationMatrix () | |
| G4tgbRotationMatrix (G4tgrRotationMatrix *tgr) | |
| G4RotationMatrix * | BuildG4RotMatrix () |
| G4RotationMatrix * | BuildG4RotMatrixFrom3 (std::vector< G4double > &values) |
| G4RotationMatrix * | BuildG4RotMatrixFrom6 (std::vector< G4double > &values) |
| G4RotationMatrix * | BuildG4RotMatrixFrom9 (std::vector< G4double > &values) |
| G4String | GetName () |
Definition at line 52 of file G4tgbRotationMatrix.hh.
| G4tgbRotationMatrix::G4tgbRotationMatrix | ( | ) |
Definition at line 43 of file G4tgbRotationMatrix.cc.
| G4tgbRotationMatrix::~G4tgbRotationMatrix | ( | ) |
Definition at line 50 of file G4tgbRotationMatrix.cc.
| G4tgbRotationMatrix::G4tgbRotationMatrix | ( | G4tgrRotationMatrix * | tgr | ) |
Definition at line 56 of file G4tgbRotationMatrix.cc.
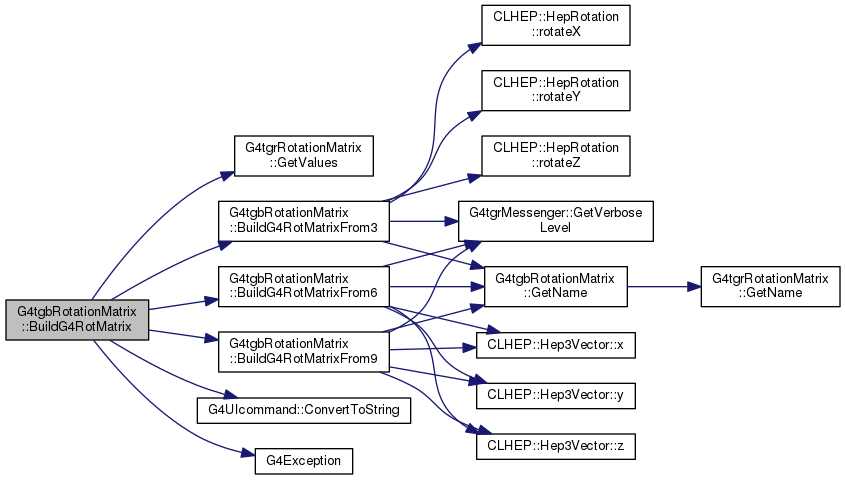
| G4RotationMatrix * G4tgbRotationMatrix::BuildG4RotMatrix | ( | ) |
Definition at line 63 of file G4tgbRotationMatrix.cc.

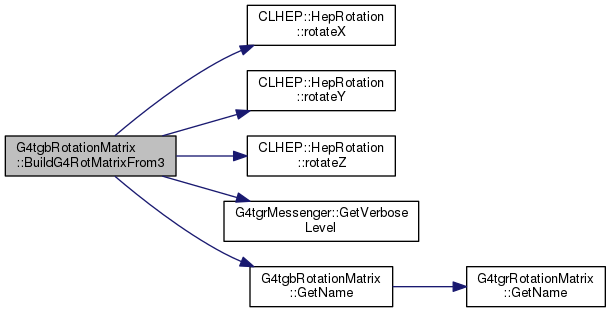
| G4RotationMatrix * G4tgbRotationMatrix::BuildG4RotMatrixFrom3 | ( | std::vector< G4double > & | values | ) |
Definition at line 88 of file G4tgbRotationMatrix.cc.

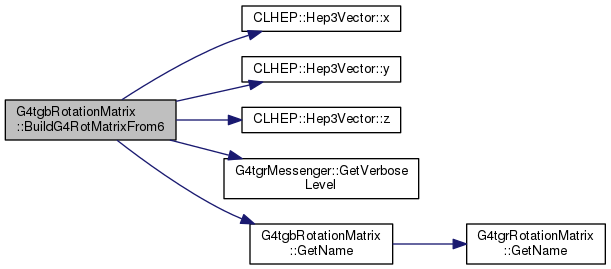
| G4RotationMatrix * G4tgbRotationMatrix::BuildG4RotMatrixFrom6 | ( | std::vector< G4double > & | values | ) |
Definition at line 110 of file G4tgbRotationMatrix.cc.

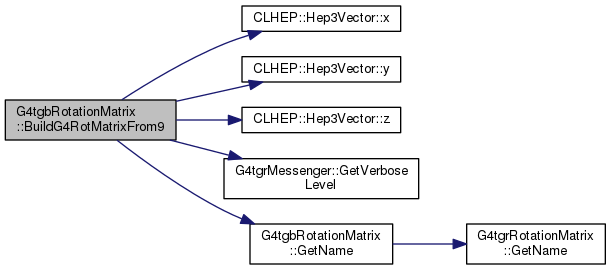
| G4RotationMatrix * G4tgbRotationMatrix::BuildG4RotMatrixFrom9 | ( | std::vector< G4double > & | values | ) |
Definition at line 150 of file G4tgbRotationMatrix.cc.

Definition at line 69 of file G4tgbRotationMatrix.hh.


 1.8.5
1.8.5 
