#include <boost/python.hpp>
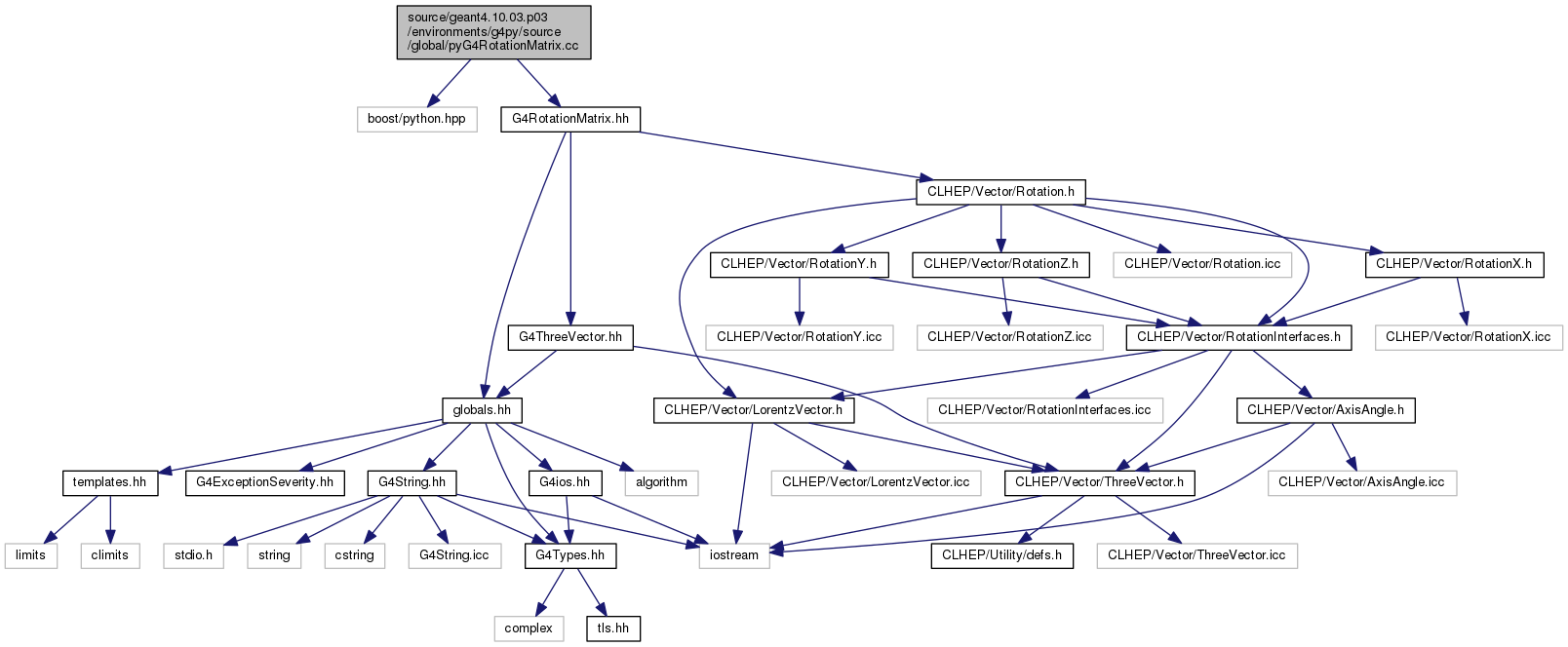
#include "G4RotationMatrix.hh"
Go to the source code of this file.
| void export_G4RotationMatrix |
( |
| ) |
|
Definition at line 54 of file pyG4RotationMatrix.cc.
56 class_<G4RotationMatrix>(
"G4RotationMatrix",
"rotation matrix")
58 .def(init<const XXX&>())
61 .add_property(
"xx", &XXX::xx)
62 .add_property(
"xy", &XXX::xy)
63 .add_property(
"xz", &XXX::xz)
64 .add_property(
"yx", &XXX::yx)
65 .add_property(
"yy", &XXX::yy)
66 .add_property(
"yz", &XXX::yz)
67 .add_property(
"zx", &XXX::zx)
68 .add_property(
"zy", &XXX::zy)
69 .add_property(
"zz", &XXX::zz)
70 .def_readonly(
"IDENTITY", &XXX::IDENTITY)
73 .def(
"colX", &XXX::colX)
74 .def(
"colY", &XXX::colY)
75 .def(
"colZ", &XXX::colZ)
76 .def(
"rowX", &XXX::rowX)
77 .def(
"rowY", &XXX::rowY)
78 .def(
"rowZ", &XXX::rowZ)
79 .def(
"getPhi", &XXX::getPhi)
80 .def(
"getTheta", &XXX::getTheta)
81 .def(
"getPsi", &XXX::getPsi)
82 .def(
"phi", &XXX::phi)
83 .def(
"theta", &XXX::theta)
84 .def(
"psi", &XXX::psi)
85 .def(
"getDelta", &XXX::getDelta)
86 .def(
"getAxis", &XXX::getAxis)
87 .def(
"delta", &XXX::axis)
88 .def(
"axis", &XXX::delta)
89 .def(
"phiX", &XXX::phiX)
90 .def(
"phiY", &XXX::phiY)
91 .def(
"phiZ", &XXX::phiZ)
92 .def(
"thetaX", &XXX::thetaX)
93 .def(
"thetaY", &XXX::thetaY)
94 .def(
"thetaZ", &XXX::thetaZ)
95 .def(
"setPhi", &XXX::setPhi)
96 .def(
"setTheta", &XXX::setTheta)
97 .def(
"setPsi", &XXX::setPsi)
98 .def(
"setAxis", &XXX::setAxis)
99 .def(
"setDelta", &XXX::setDelta)
100 .def(
"isIdentity", &XXX::isIdentity)
101 .def(
"rotateX", &XXX::rotateX,
102 return_value_policy<reference_existing_object>())
103 .def(
"rotateY", &XXX::rotateY,
104 return_value_policy<reference_existing_object>())
105 .def(
"rotateZ", &XXX::rotateZ,
106 return_value_policy<reference_existing_object>())
108 return_value_policy<reference_existing_object>())
110 return_value_policy<reference_existing_object>())
111 .def(
"rotateAxes", &XXX::rotateAxes,
112 return_value_policy<reference_existing_object>())
113 .def(
"inverse", &XXX::inverse)
114 .def(
"invert", &XXX::invert,
115 return_value_policy<reference_existing_object>())
118 .def(self_ns::str(
self))
CLHEP::Hep3Vector G4ThreeVector
XXX &(XXX::* f2_rotate)(G4double, const G4ThreeVector *)
XXX &(XXX::* f1_rotate)(G4double, const G4ThreeVector &)

 1.8.5
1.8.5 
