|
Geant4
10.03.p03
|
|
Geant4
10.03.p03
|
#include <G4TriangularFacet.hh>
Additional Inherited Members | |
 Static Protected Attributes inherited from G4VFacet Static Protected Attributes inherited from G4VFacet | |
| static const G4double | dirTolerance = 1.0E-14 |
| static const G4double | kCarTolerance |
Definition at line 65 of file G4TriangularFacet.hh.
| G4TriangularFacet::G4TriangularFacet | ( | ) |
Definition at line 167 of file G4TriangularFacet.cc.
| G4TriangularFacet::~G4TriangularFacet | ( | ) |
Definition at line 187 of file G4TriangularFacet.cc.

| G4TriangularFacet::G4TriangularFacet | ( | const G4ThreeVector & | vt0, |
| const G4ThreeVector & | vt1, | ||
| const G4ThreeVector & | vt2, | ||
| G4FacetVertexType | vertexType | ||
| ) |
Definition at line 79 of file G4TriangularFacet.cc.
| G4TriangularFacet::G4TriangularFacet | ( | const G4TriangularFacet & | right | ) |
Definition at line 208 of file G4TriangularFacet.cc.
|
inlinevirtual |
Implements G4VFacet.
Definition at line 165 of file G4TriangularFacet.hh.

| G4ThreeVector G4TriangularFacet::Distance | ( | const G4ThreeVector & | p | ) |
Definition at line 268 of file G4TriangularFacet.cc.

|
virtual |
Implements G4VFacet.
Definition at line 452 of file G4TriangularFacet.cc.
|
virtual |
Implements G4VFacet.
Definition at line 487 of file G4TriangularFacet.cc.
|
virtual |
Implements G4VFacet.
Definition at line 528 of file G4TriangularFacet.cc.
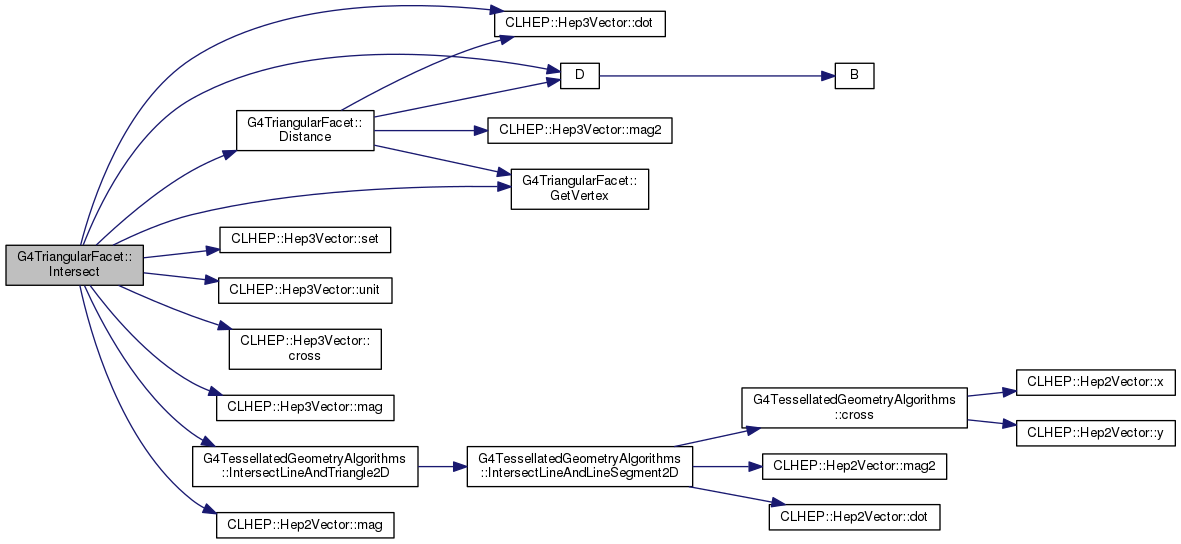
|
virtual |
Implements G4VFacet.
Definition at line 771 of file G4TriangularFacet.cc.
|
inlinevirtual |
Implements G4VFacet.
Definition at line 155 of file G4TriangularFacet.hh.
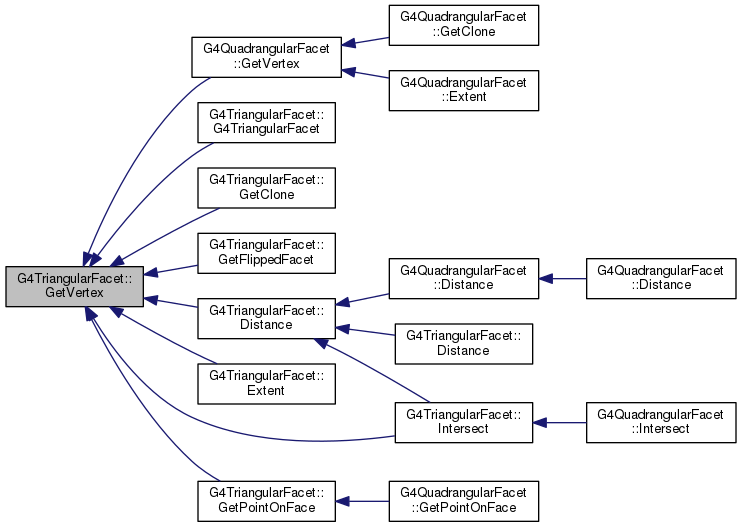
|
virtual |
Implements G4VFacet.
Definition at line 233 of file G4TriangularFacet.cc.
|
virtual |
Implements G4VFacet.
Definition at line 778 of file G4TriangularFacet.cc.
| G4TriangularFacet * G4TriangularFacet::GetFlippedFacet | ( | ) |
Definition at line 247 of file G4TriangularFacet.cc.
|
inlinevirtual |
Implements G4VFacet.
Definition at line 139 of file G4TriangularFacet.hh.

|
virtual |
Implements G4VFacet.
Definition at line 757 of file G4TriangularFacet.cc.


|
inlinevirtual |
Implements G4VFacet.
Definition at line 160 of file G4TriangularFacet.hh.
|
virtual |
Implements G4VFacet.
Definition at line 785 of file G4TriangularFacet.cc.

|
inlinevirtual |
Implements G4VFacet.
Definition at line 144 of file G4TriangularFacet.hh.
Implements G4VFacet.
Definition at line 172 of file G4TriangularFacet.hh.
|
virtual |
Implements G4VFacet.
Definition at line 565 of file G4TriangularFacet.cc.

|
inlinevirtual |
Implements G4VFacet.
Definition at line 134 of file G4TriangularFacet.hh.

| G4TriangularFacet & G4TriangularFacet::operator= | ( | const G4TriangularFacet & | right | ) |
Definition at line 217 of file G4TriangularFacet.cc.

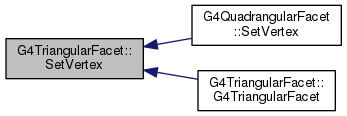
| void G4TriangularFacet::SetSurfaceNormal | ( | G4ThreeVector | normal | ) |
|
inlinevirtual |
Implements G4VFacet.
Definition at line 150 of file G4TriangularFacet.hh.
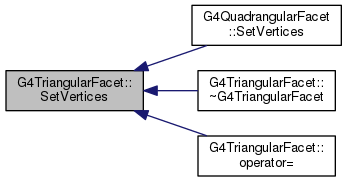
Implements G4VFacet.
Definition at line 178 of file G4TriangularFacet.hh.
|
inlinevirtual |
Implements G4VFacet.
Definition at line 183 of file G4TriangularFacet.hh.
 1.8.5
1.8.5 

