|
Geant4
10.03.p03
|
|
Geant4
10.03.p03
|
#include <G4SurfaceVoxelizer.hh>
Public Member Functions | |
| void | Voxelize (std::vector< G4VFacet * > &facets) |
| void | DisplayVoxelLimits () |
| void | DisplayBoundaries () |
| void | DisplayListNodes () const |
| G4SurfaceVoxelizer () | |
| ~G4SurfaceVoxelizer () | |
| void | GetCandidatesVoxel (std::vector< G4int > &voxels) |
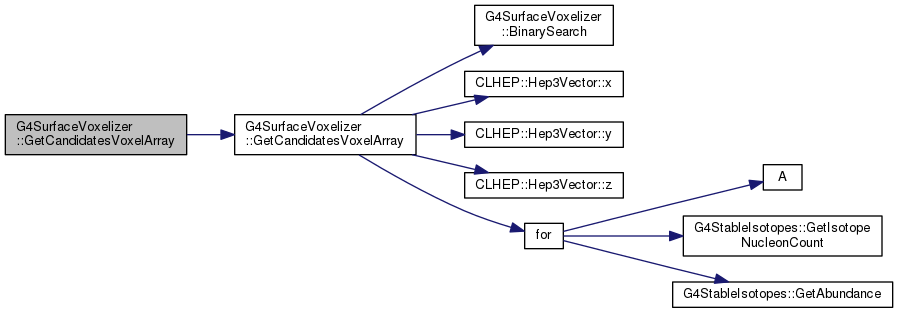
| G4int | GetCandidatesVoxelArray (const G4ThreeVector &point, std::vector< G4int > &list, G4SurfBits *crossed=0) const |
| G4int | GetCandidatesVoxelArray (const std::vector< G4int > &voxels, const G4SurfBits bitmasks[], std::vector< G4int > &list, G4SurfBits *crossed=0) const |
| G4int | GetCandidatesVoxelArray (const std::vector< G4int > &voxels, std::vector< G4int > &list, G4SurfBits *crossed=0) const |
| const std::vector< G4VoxelBox > & | GetBoxes () const |
| const std::vector< G4double > & | GetBoundary (G4int index) const |
| G4bool | UpdateCurrentVoxel (const G4ThreeVector &point, const G4ThreeVector &direction, std::vector< G4int > &curVoxel) const |
| void | GetVoxel (std::vector< G4int > &curVoxel, const G4ThreeVector &point) const |
| G4int | GetBitsPerSlice () const |
| G4bool | Contains (const G4ThreeVector &point) const |
| G4double | DistanceToNext (const G4ThreeVector &point, const G4ThreeVector &direction, const std::vector< G4int > &curVoxel) const |
| G4double | DistanceToFirst (const G4ThreeVector &point, const G4ThreeVector &direction) const |
| G4double | DistanceToBoundingBox (const G4ThreeVector &point) const |
| G4int | GetVoxelsIndex (G4int x, G4int y, G4int z) const |
| G4int | GetVoxelsIndex (const std::vector< G4int > &voxels) const |
| G4int | GetPointIndex (const G4ThreeVector &p) const |
| const G4SurfBits & | Empty () const |
| G4bool | IsEmpty (G4int index) const |
| void | SetMaxVoxels (G4int max) |
| void | SetMaxVoxels (const G4ThreeVector &reductionRatio) |
| G4int | GetMaxVoxels (G4ThreeVector &ratioOfReduction) |
| G4int | AllocatedMemory () |
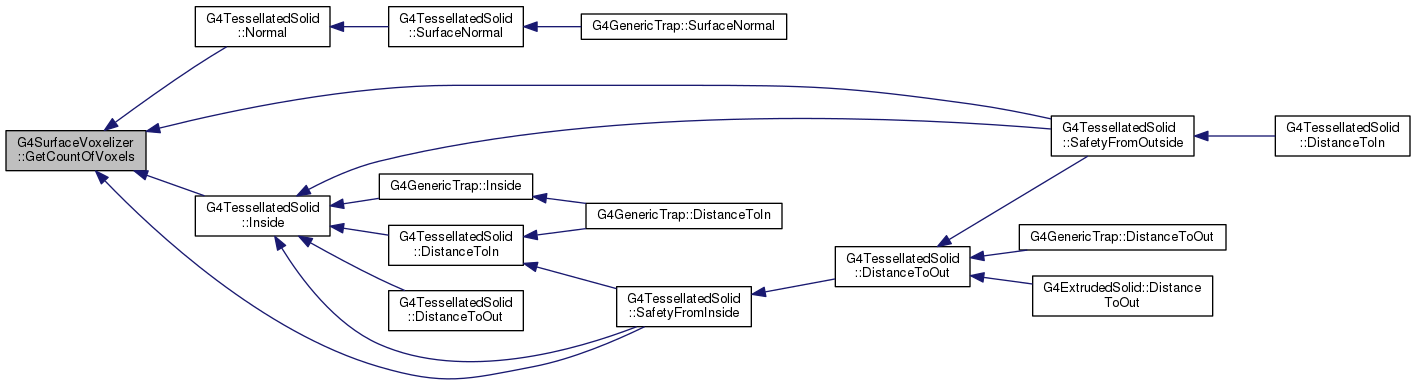
| long long | GetCountOfVoxels () const |
| long long | CountVoxels (std::vector< G4double > boundaries[]) const |
| const std::vector< G4int > & | GetCandidates (std::vector< G4int > &curVoxel) const |
| G4int | GetVoxelBoxesSize () const |
| const G4VoxelBox & | GetVoxelBox (G4int i) const |
| const std::vector< G4int > & | GetVoxelBoxCandidates (G4int i) const |
| G4int | GetTotalCandidates () const |
Static Public Member Functions | |
| template<typename T > | |
| static G4int | BinarySearch (const std::vector< T > &vec, T value) |
| static G4double | MinDistanceToBox (const G4ThreeVector &aPoint, const G4ThreeVector &f) |
| static G4int | SetDefaultVoxelsCount (G4int count) |
| static G4int | GetDefaultVoxelsCount () |
Definition at line 66 of file G4SurfaceVoxelizer.hh.
| G4SurfaceVoxelizer::G4SurfaceVoxelizer | ( | ) |
Definition at line 60 of file G4SurfaceVoxelizer.cc.

| G4SurfaceVoxelizer::~G4SurfaceVoxelizer | ( | ) |
Definition at line 73 of file G4SurfaceVoxelizer.cc.
| G4int G4SurfaceVoxelizer::AllocatedMemory | ( | ) |
Definition at line 1083 of file G4SurfaceVoxelizer.cc.


|
inlinestatic |

| G4bool G4SurfaceVoxelizer::Contains | ( | const G4ThreeVector & | point | ) | const |
Definition at line 926 of file G4SurfaceVoxelizer.cc.
|
inline |

| void G4SurfaceVoxelizer::DisplayBoundaries | ( | ) |
Definition at line 281 of file G4SurfaceVoxelizer.cc.
| void G4SurfaceVoxelizer::DisplayListNodes | ( | ) | const |
Definition at line 389 of file G4SurfaceVoxelizer.cc.

| void G4SurfaceVoxelizer::DisplayVoxelLimits | ( | ) |
Definition at line 154 of file G4SurfaceVoxelizer.cc.
| G4double G4SurfaceVoxelizer::DistanceToBoundingBox | ( | const G4ThreeVector & | point | ) | const |
Definition at line 948 of file G4SurfaceVoxelizer.cc.

| G4double G4SurfaceVoxelizer::DistanceToFirst | ( | const G4ThreeVector & | point, |
| const G4ThreeVector & | direction | ||
| ) | const |
Definition at line 938 of file G4SurfaceVoxelizer.cc.
| G4double G4SurfaceVoxelizer::DistanceToNext | ( | const G4ThreeVector & | point, |
| const G4ThreeVector & | direction, | ||
| const std::vector< G4int > & | curVoxel | ||
| ) | const |
Definition at line 983 of file G4SurfaceVoxelizer.cc.
|
inline |
|
inline |
|
inline |
|
inline |

Definition at line 758 of file G4SurfaceVoxelizer.cc.
| G4int G4SurfaceVoxelizer::GetCandidatesVoxelArray | ( | const G4ThreeVector & | point, |
| std::vector< G4int > & | list, | ||
| G4SurfBits * | crossed = 0 |
||
| ) | const |
Definition at line 792 of file G4SurfaceVoxelizer.cc.

| G4int G4SurfaceVoxelizer::GetCandidatesVoxelArray | ( | const std::vector< G4int > & | voxels, |
| const G4SurfBits | bitmasks[], | ||
| std::vector< G4int > & | list, | ||
| G4SurfBits * | crossed = 0 |
||
| ) | const |
Definition at line 859 of file G4SurfaceVoxelizer.cc.

| G4int G4SurfaceVoxelizer::GetCandidatesVoxelArray | ( | const std::vector< G4int > & | voxels, |
| std::vector< G4int > & | list, | ||
| G4SurfBits * | crossed = 0 |
||
| ) | const |
Definition at line 917 of file G4SurfaceVoxelizer.cc.
|
inline |
|
static |
Definition at line 1077 of file G4SurfaceVoxelizer.cc.
|
inline |
|
inline |

|
inline |
|
inline |

|
inline |
|
inline |
|
static |
Definition at line 957 of file G4SurfaceVoxelizer.cc.


Definition at line 1069 of file G4SurfaceVoxelizer.cc.
Definition at line 1055 of file G4SurfaceVoxelizer.cc.

| void G4SurfaceVoxelizer::SetMaxVoxels | ( | const G4ThreeVector & | reductionRatio | ) |
Definition at line 1062 of file G4SurfaceVoxelizer.cc.
| G4bool G4SurfaceVoxelizer::UpdateCurrentVoxel | ( | const G4ThreeVector & | point, |
| const G4ThreeVector & | direction, | ||
| std::vector< G4int > & | curVoxel | ||
| ) | const |
Definition at line 1024 of file G4SurfaceVoxelizer.cc.

Definition at line 626 of file G4SurfaceVoxelizer.cc.
 1.8.5
1.8.5 
