#include <G4SafetyHelper.hh>
|
| | G4SafetyHelper () |
| |
| | ~G4SafetyHelper () |
| |
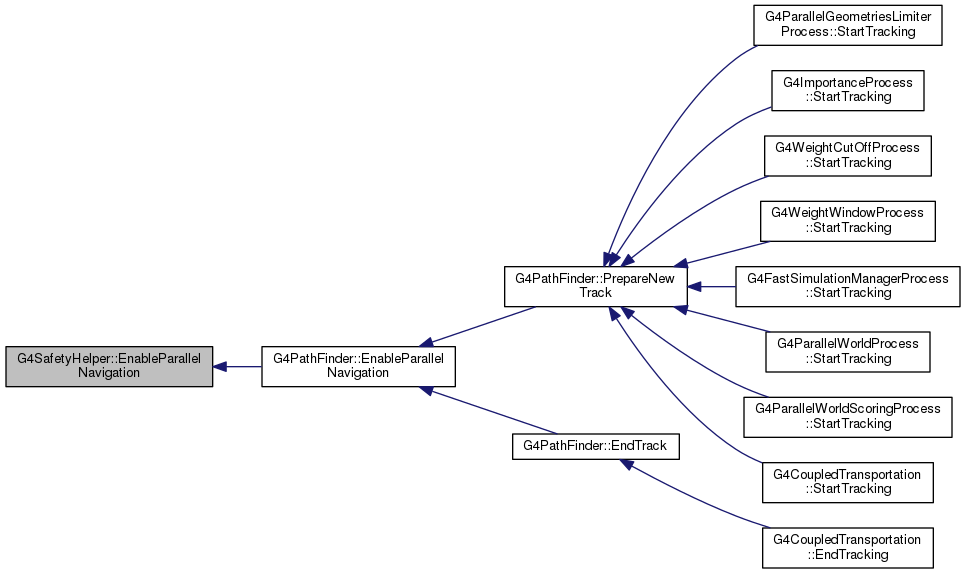
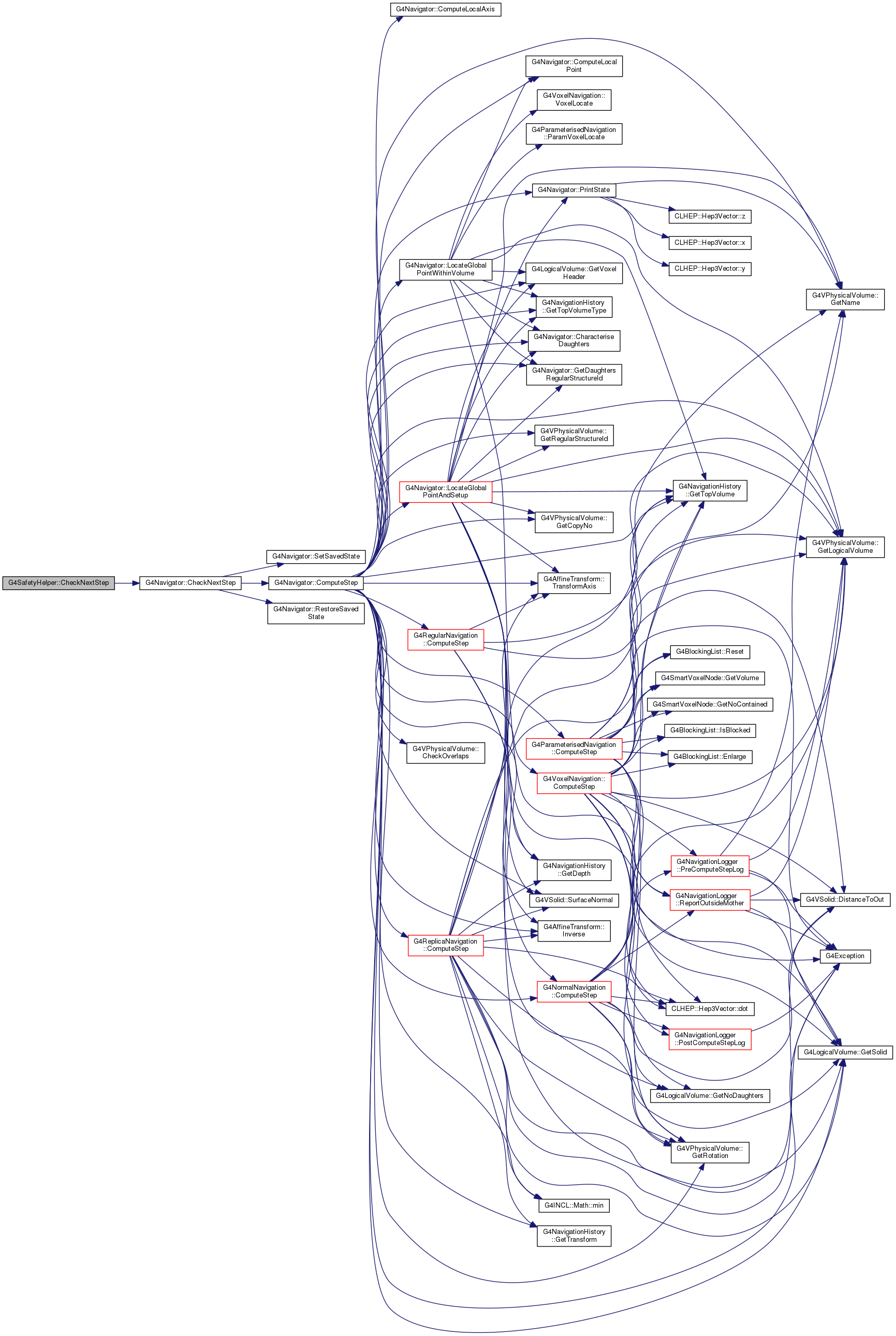
| G4double | CheckNextStep (const G4ThreeVector &position, const G4ThreeVector &direction, const G4double currentMaxStep, G4double &newSafety) |
| |
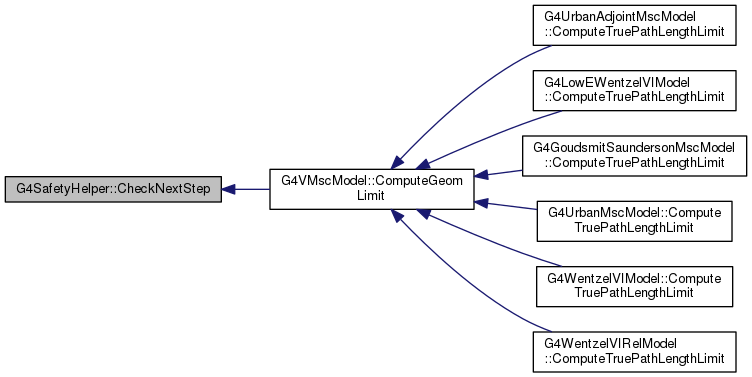
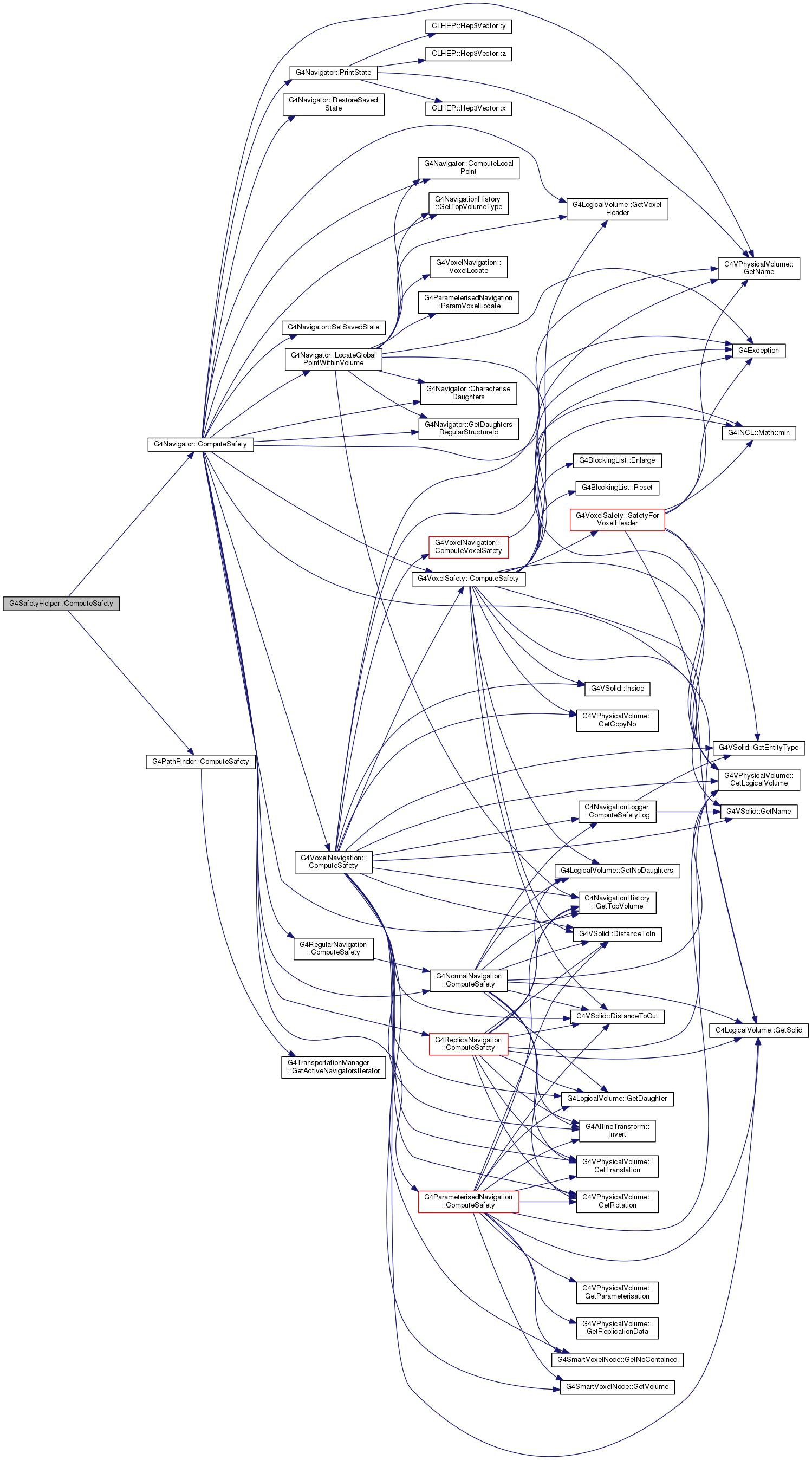
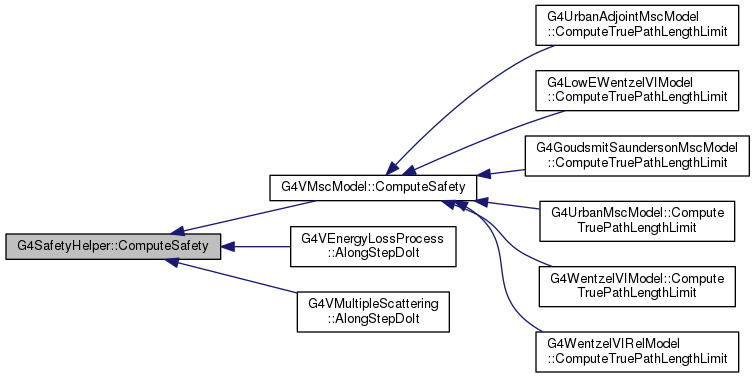
| G4double | ComputeSafety (const G4ThreeVector &pGlobalPoint, G4double maxRadius=DBL_MAX) |
| |
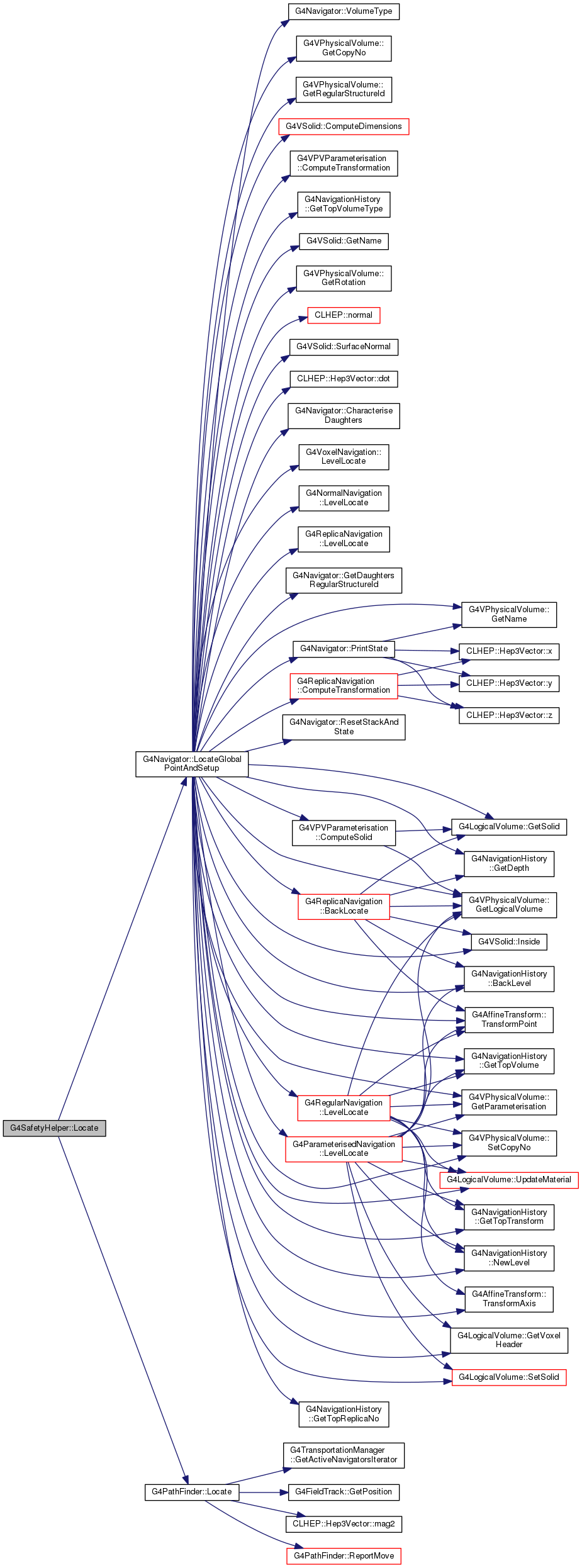
| void | Locate (const G4ThreeVector &pGlobalPoint, const G4ThreeVector &direction) |
| |
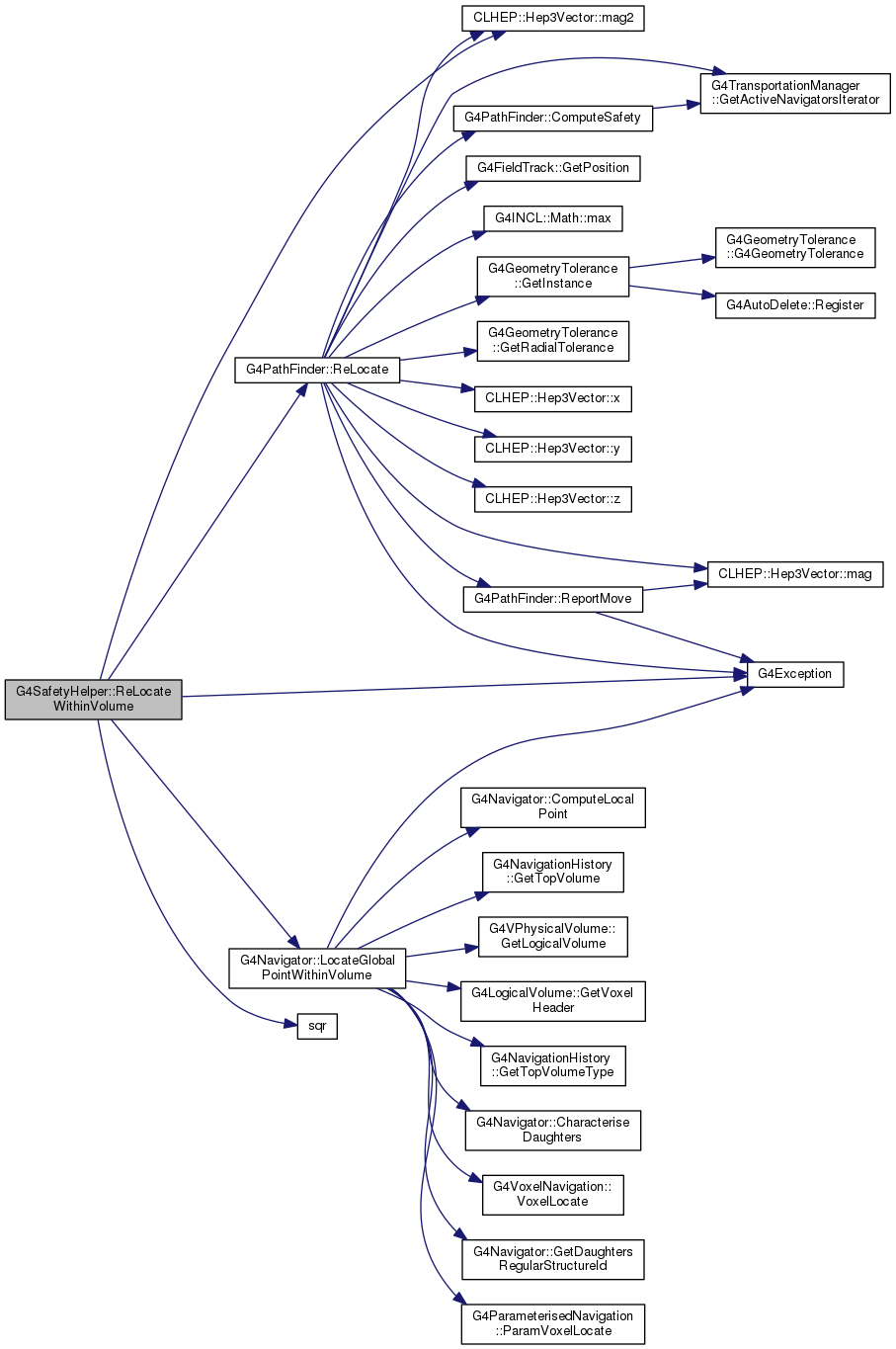
| void | ReLocateWithinVolume (const G4ThreeVector &pGlobalPoint) |
| |
| G4bool | RecheckDistanceToCurrentBoundary (const G4ThreeVector &pGlobalPoint, const G4ThreeVector &pDirection, const G4double pCurrentProposedStepLength, G4double *prDistance, G4double *prNewSafety=0) const |
| |
| void | EnableParallelNavigation (G4bool parallel) |
| |
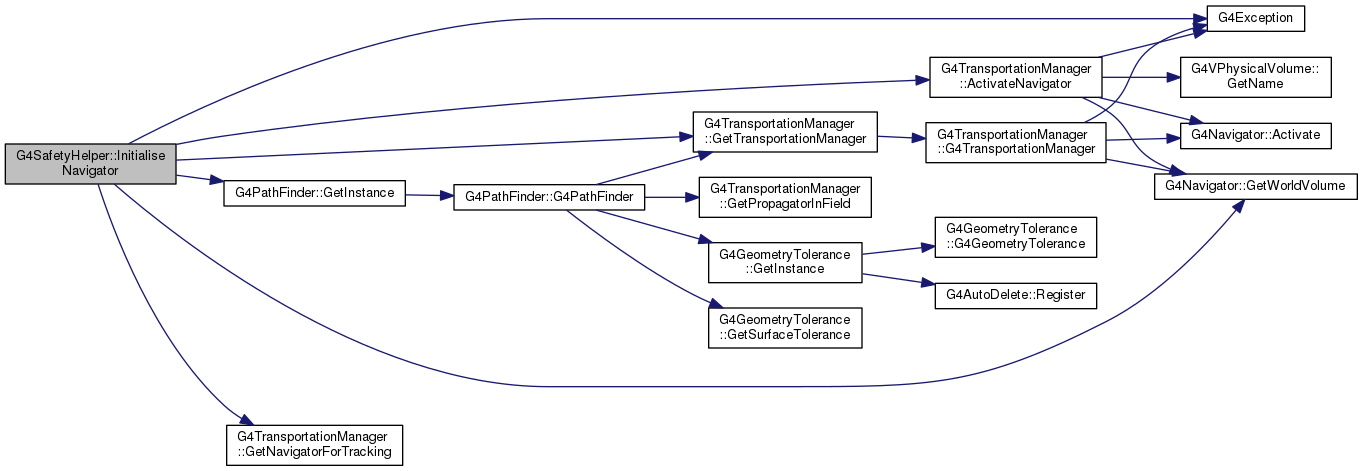
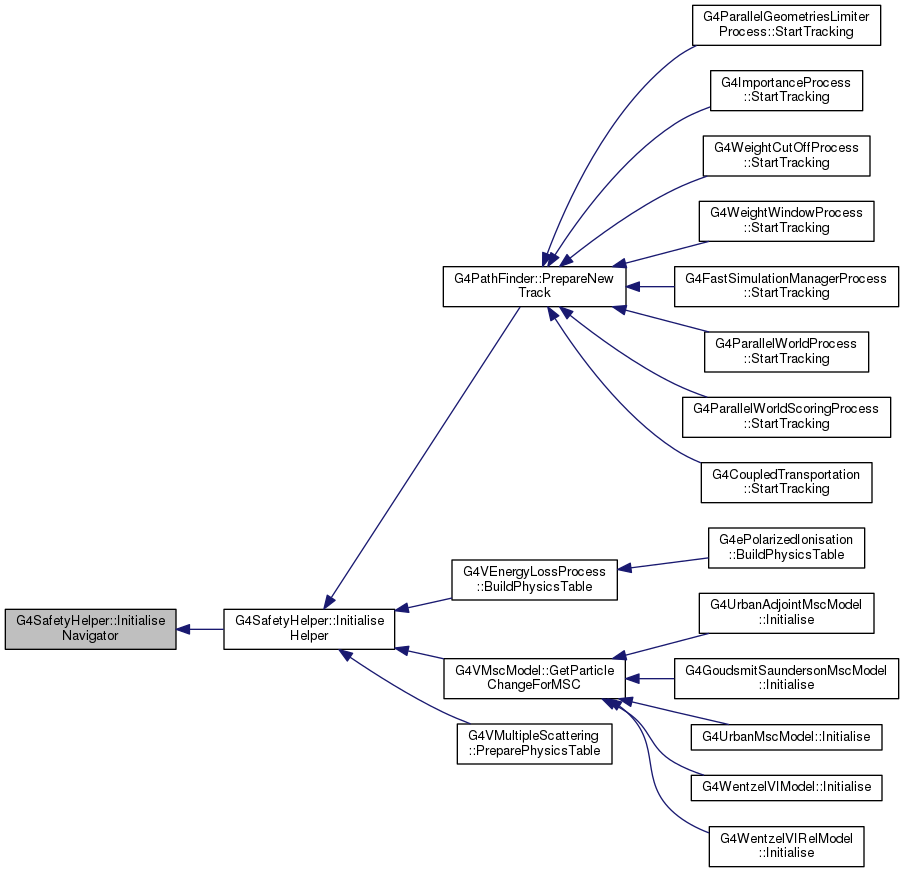
| void | InitialiseNavigator () |
| |
| G4int | SetVerboseLevel (G4int lev) |
| |
| G4VPhysicalVolume * | GetWorldVolume () |
| |
| void | SetCurrentSafety (G4double val, const G4ThreeVector &pos) |
| |
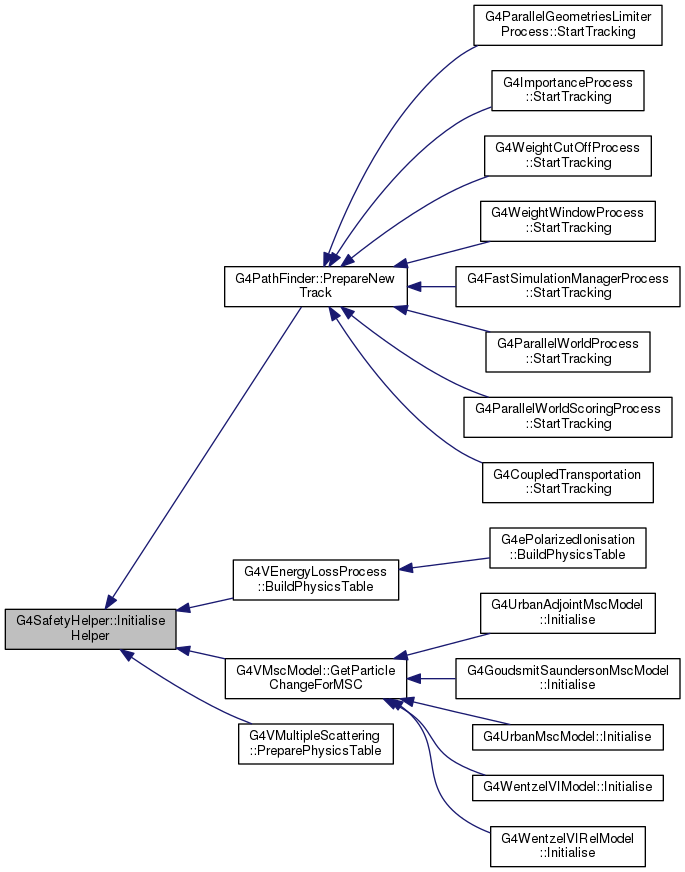
| void | InitialiseHelper () |
| |
Definition at line 53 of file G4SafetyHelper.hh.
| G4SafetyHelper::G4SafetyHelper |
( |
| ) |
|
Definition at line 42 of file G4SafetyHelper.cc.
43 : fUseParallelGeometries(
false),
46 fLastSafetyPosition(0.0,0.0,0.0),
| G4SafetyHelper::~G4SafetyHelper |
( |
| ) |
|
Definition at line 94 of file G4SafetyHelper.cc.
106 fLastSafety = newSafety;
G4double CheckNextStep(const G4ThreeVector &pGlobalPoint, const G4ThreeVector &pDirection, const G4double pCurrentProposedStepLength, G4double &pNewSafety)
Definition at line 114 of file G4SafetyHelper.cc.
122 if( (moveLengthSq > 0.0 ) )
124 if( !fUseParallelGeometries )
136 if( newSafety < maxLength )
138 fLastSafety= newSafety;
148 newSafety = fLastSafety;
G4double ComputeSafety(const G4ThreeVector &globalPoint)
virtual G4double ComputeSafety(const G4ThreeVector &globalpoint, const G4double pProposedMaxLength=DBL_MAX, const G4bool keepState=true)
| void G4SafetyHelper::EnableParallelNavigation |
( |
G4bool |
parallel | ) |
|
|
inline |
| void G4SafetyHelper::InitialiseHelper |
( |
| ) |
|
Definition at line 81 of file G4SafetyHelper.cc.
CLHEP::Hep3Vector G4ThreeVector
void InitialiseNavigator()
| void G4SafetyHelper::InitialiseNavigator |
( |
| ) |
|
Definition at line 59 of file G4SafetyHelper.cc.
75 "Found that existing tracking Navigator has NULL world");
static G4PathFinder * GetInstance()
G4Navigator * GetNavigatorForTracking() const
void G4Exception(const char *originOfException, const char *exceptionCode, G4ExceptionSeverity severity, const char *comments)
static G4TransportationManager * GetTransportationManager()
G4int ActivateNavigator(G4Navigator *aNavigator)
G4VPhysicalVolume * GetWorldVolume() const
Definition at line 183 of file G4SafetyHelper.cc.
186 if( !fUseParallelGeometries)
193 fpPathFinder->
Locate( newPosition, newDirection );
void Locate(const G4ThreeVector &position, const G4ThreeVector &direction, G4bool relativeSearch=true)
virtual G4VPhysicalVolume * LocateGlobalPointAndSetup(const G4ThreeVector &point, const G4ThreeVector *direction=0, const G4bool pRelativeSearch=true, const G4bool ignoreDirection=true)
Definition at line 197 of file G4SafetyHelper.cc.
205 if( !fUseParallelGeometries)
virtual G4bool RecheckDistanceToCurrentBoundary(const G4ThreeVector &pGlobalPoint, const G4ThreeVector &pDirection, const G4double CurrentProposedStepLength, G4double *prDistance, G4double *prNewSafety=0) const
G4bool RecheckDistanceToCurrentBoundary(const G4ThreeVector &pGlobalPoint, const G4ThreeVector &pDirection, const G4double pCurrentProposedStepLength, G4double *prDistance, G4double *prNewSafety=0) const
Definition at line 153 of file G4SafetyHelper.cc.
159 if( moveVec.
mag2() >
sqr(fLastSafety) )
163 ed <<
" Safety Sphere: Radius = " << fLastSafety;
164 ed <<
" Center = " << fLastSafetyPosition <<
G4endl;
165 ed <<
" New Location : Move = " << moveVec.
mag2();
166 ed <<
" Position = " << newPosition <<
G4endl;
168 "Unsafe Move> Asked to relocate beyond 'Safety sphere'.");
173 if( !fUseParallelGeometries )
179 fpPathFinder->
ReLocate( newPosition );
std::ostringstream G4ExceptionDescription
void ReLocate(const G4ThreeVector &position)
void G4Exception(const char *originOfException, const char *exceptionCode, G4ExceptionSeverity severity, const char *comments)
virtual void LocateGlobalPointWithinVolume(const G4ThreeVector &position)
| G4int G4SafetyHelper::SetVerboseLevel |
( |
G4int |
lev | ) |
|
|
inline |
The documentation for this class was generated from the following files:




 1.8.5
1.8.5