#include <G4GHEKinematicsVector.hh>
|
| | G4GHEKinematicsVector () |
| |
| | ~G4GHEKinematicsVector () |
| |
| | G4GHEKinematicsVector (const G4GHEKinematicsVector &p) |
| |
| G4GHEKinematicsVector & | operator= (const G4GHEKinematicsVector &p) |
| |
| void | SetMomentum (G4ParticleMomentum mom) |
| |
| void | SetMomentumAndUpdate (G4ParticleMomentum mom) |
| |
| const G4ParticleMomentum | GetMomentum () const |
| |
| void | SetMomentum (G4double x, G4double y, G4double z) |
| |
| void | SetMomentumAndUpdate (G4double x, G4double y, G4double z) |
| |
| void | SetMomentum (G4double x, G4double y) |
| |
| void | SetMomentumAndUpdate (G4double x, G4double y) |
| |
| void | SetMomentum (G4double z) |
| |
| void | SetMomentumAndUpdate (G4double z) |
| |
| void | SetEnergy (G4double e) |
| |
| void | SetEnergyAndUpdate (G4double e) |
| |
| void | SetKineticEnergy (G4double ekin) |
| |
| void | SetKineticEnergyAndUpdate (G4double ekin) |
| |
| G4double | GetEnergy () |
| |
| G4double | GetKineticEnergy () |
| |
| void | SetMass (G4double mas) |
| |
| void | SetMassAndUpdate (G4double mas) |
| |
| G4double | GetMass () |
| |
| void | SetCharge (G4double c) |
| |
| G4double | GetCharge () |
| |
| void | SetTOF (G4double t) |
| |
| G4double | GetTOF () |
| |
| void | SetSide (G4int sid) |
| |
| G4int | GetSide () |
| |
| void | setFlag (G4bool f) |
| |
| G4bool | getFlag () |
| |
| void | SetCode (G4int c) |
| |
| void | SetParticleDef (G4ParticleDefinition *c) |
| |
| G4int | GetCode () |
| |
| G4ParticleDefinition * | GetParticleDef () |
| |
| void | SetZero () |
| |
| void | Add (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| void | Sub (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
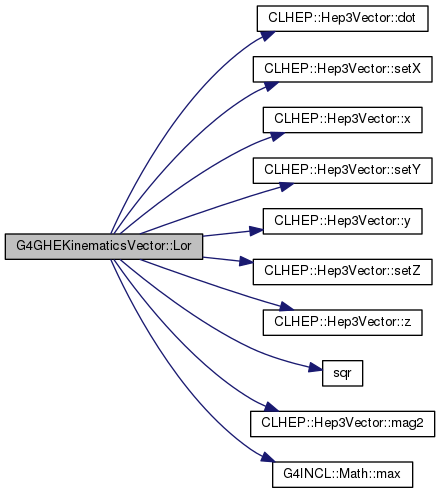
| void | Lor (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
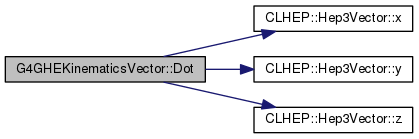
| G4double | CosAng (const G4GHEKinematicsVector &p) |
| |
| G4double | Ang (const G4GHEKinematicsVector &p) |
| |
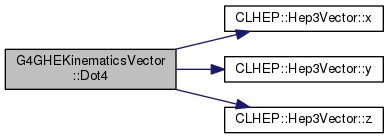
| G4double | Dot4 (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
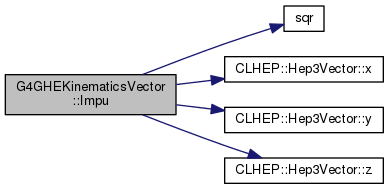
| G4double | Impu (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| void | Add3 (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| void | Sub3 (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| void | Cross (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| G4double | Dot (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| void | Smul (const G4GHEKinematicsVector &p, G4double h) |
| |
| void | SmulAndUpdate (const G4GHEKinematicsVector &p, G4double h) |
| |
| void | Norz (const G4GHEKinematicsVector &p) |
| |
| G4double | Length () |
| |
| void | Exch (G4GHEKinematicsVector &p1) |
| |
| void | Defs1 (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2) |
| |
| void | Defs (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &p2, G4GHEKinematicsVector &my, G4GHEKinematicsVector &mz) |
| |
| void | Trac (const G4GHEKinematicsVector &p1, const G4GHEKinematicsVector &mx, const G4GHEKinematicsVector &my, const G4GHEKinematicsVector &mz) |
| |
| void | Print (G4int LLL) |
| |
Definition at line 50 of file G4GHEKinematicsVector.hh.
| G4GHEKinematicsVector::G4GHEKinematicsVector |
( |
| ) |
|
|
inline |
| G4GHEKinematicsVector::~G4GHEKinematicsVector |
( |
| ) |
|
|
inline |
Definition at line 361 of file G4GHEKinematicsVector.hh.
367 mass = -1. * std::sqrt( -b );
369 mass = std::sqrt( b );
G4ParticleDefinition * particleDef
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
Definition at line 424 of file G4GHEKinematicsVector.hh.
432 if( std::fabs(a) > 1.0 ) a<0.0 ? a=-1.0 : a=1.0;
std::vector< ExP01TrackerHit * > a
G4ParticleMomentum momentum
Definition at line 411 of file G4GHEKinematicsVector.hh.
419 if( std::fabs(a) > 1.0 ) a<0.0 ? a=-1.0 : a=1.0;
std::vector< ExP01TrackerHit * > a
G4ParticleMomentum momentum
Definition at line 579 of file G4GHEKinematicsVector.hh.
586 G4double sint = 0.5 * ( std::sqrt(std::fabs((1.-cost)*(1.+cost)))
G4ParticleMomentum momentum
static constexpr double halfpi
static constexpr double pi
| G4double G4GHEKinematicsVector::GetCharge |
( |
| ) |
|
|
inline |
| G4int G4GHEKinematicsVector::GetCode |
( |
| ) |
|
|
inline |
| G4double G4GHEKinematicsVector::GetEnergy |
( |
| ) |
|
|
inline |
| G4bool G4GHEKinematicsVector::getFlag |
( |
| ) |
|
|
inline |
| G4double G4GHEKinematicsVector::GetKineticEnergy |
( |
| ) |
|
|
inline |
| G4double G4GHEKinematicsVector::GetMass |
( |
| ) |
|
|
inline |
| G4int G4GHEKinematicsVector::GetSide |
( |
| ) |
|
|
inline |
| G4double G4GHEKinematicsVector::GetTOF |
( |
| ) |
|
|
inline |
| G4double G4GHEKinematicsVector::Length |
( |
| ) |
|
|
inline |
Definition at line 393 of file G4GHEKinematicsVector.hh.
G4ParticleDefinition * particleDef
double dot(const Hep3Vector &) const
std::vector< ExP01TrackerHit * > a
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
Definition at line 522 of file G4GHEKinematicsVector.hh.
525 if (a > 0.0) a = 1./std::sqrt(a);
G4ParticleDefinition * particleDef
std::vector< ExP01TrackerHit * > a
G4ParticleMomentum momentum
| void G4GHEKinematicsVector::Print |
( |
G4int |
LLL | ) |
|
|
inline |
Definition at line 674 of file G4GHEKinematicsVector.hh.
676 G4cout <<
"G4GHEKinematicsVector: "
G4ParticleDefinition * particleDef
G4GLOB_DLL std::ostream G4cout
G4ParticleMomentum momentum
| void G4GHEKinematicsVector::SetCode |
( |
G4int |
c | ) |
|
|
inline |
| void G4GHEKinematicsVector::SetEnergyAndUpdate |
( |
G4double |
e | ) |
|
|
inline |
| void G4GHEKinematicsVector::SetKineticEnergy |
( |
G4double |
ekin | ) |
|
|
inline |
| void G4GHEKinematicsVector::SetKineticEnergyAndUpdate |
( |
G4double |
ekin | ) |
|
|
inline |
| void G4GHEKinematicsVector::SetMassAndUpdate |
( |
G4double |
mas | ) |
|
|
inline |
Definition at line 269 of file G4GHEKinematicsVector.hh.
287 G4double sint = std::sqrt(1.-cost*cost);
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
static constexpr double twopi
Definition at line 114 of file G4GHEKinematicsVector.hh.
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
Definition at line 135 of file G4GHEKinematicsVector.hh.
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
Definition at line 154 of file G4GHEKinematicsVector.hh.
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
| void G4GHEKinematicsVector::SetMomentumAndUpdate |
( |
G4double |
z | ) |
|
|
inline |
Definition at line 171 of file G4GHEKinematicsVector.hh.
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
| void G4GHEKinematicsVector::SetSide |
( |
G4int |
sid | ) |
|
|
inline |
| void G4GHEKinematicsVector::SetZero |
( |
| ) |
|
|
inline |
Definition at line 377 of file G4GHEKinematicsVector.hh.
383 mass = -1. * std::sqrt( -b );
385 mass = std::sqrt( b );
G4ParticleDefinition * particleDef
T max(const T t1, const T t2)
brief Return the largest of the two arguments
G4ParticleMomentum momentum
| G4int G4GHEKinematicsVector::code |
| G4bool G4GHEKinematicsVector::flag |
| G4double G4GHEKinematicsVector::kineticEnergy |
| G4int G4GHEKinematicsVector::side |
| G4double G4GHEKinematicsVector::timeOfFlight |
The documentation for this class was generated from the following file:









 1.8.5
1.8.5 
